Linux USB
时间轴
2026-02-16
init
Linux 驱动笔记
| 目录 | 链接 |
|---|---|
| 1. Linux 驱动框架 | |
| 2. Linux 驱动加载逻辑 | |
| 3. 字符设备基础 | |
| 4. 并发与竞争 | |
| 5. 高级字符设备进阶 | |
| 6. 中断 | |
| 7. 平台总线 | |
| 8. 设备树 | |
| 9. 设备模型 | |
| 10. 热插拔 | |
| 11. pinctrl 子系统 | |
| 12. gpio 子系统 | |
| 13. 输入子系统 | |
| 14. 单总线 | |
| 15. I2C | |
| 16. SPI | |
| 17. UART | |
| 18. PWM | |
| 19. RTC | |
| 20. Watchdog | |
| 21. CAN | |
| 22. 网络设备 | |
| 23. ADC | |
| 24. IIO | |
| 25. USB | |
| 26. LCD |
USB 基础
USB(通用串行总线:Universal Serial Bus) 是计算机和电子设备间广泛使用的通用接口标准,能传输数据与供电。USB 是一个标准。
- 概念提出与初代标准制定(1994 - 1996 年)
1994 年,康柏、IBM、英特尔等公司联手开发 USB 技术,想简化计算机与外设连接。1996年,USB 1.0 标准发布,支持 1.5Mbps(低速)和 12Mbps(全速)传输速率,满足鼠标、键盘等低速设备需求,还实现热插拔,方便了用户。 - 技术改进与普及(1998 - 2000 年)
1998 年,USB 1.1 优化电气特性和兼容性,提高可靠性,推动设备普及。2000 年,USB 2.0 是个大突破,引入 480Mbps 高速传输模式,满足数码相机、移动硬盘等高速设备需求,成了主流接口标准。 - 高速发展与性能提升(2008 - 2013 年)
2008 年,USB 3.0(后称 USB 3.1 Gen 1)问世,速率提至 5Gbps,优化电源管理与信号传输,支持高功率设备充电,满足高清视频传输等需求。2013 年,USB 3.1 Gen 2 发布,速率达10Gbps,为高性能外置 SSD 等设备提供可能。 - 持续演进与多样化(2014 年至今)
2014 年,USB Type - C 接口出现,它尺寸小、能正反插、可高功率传输(最高 100W)且能高速传数据,逐渐成主流。2017 年,USB 3.2 定义不同速率标识,丰富速率选择。2019 年,USB4 基于雷电 3 技术,速率最高达 40Gbps,增强多显示器支持等功能,拓展应用场景。
USB 不断发展,在数据传输、设备兼容、供电能力等方面持续提升,成为现代电子设备必不可少的连接方式,USB 接口有不同种类,接口标准可以参考官网:
USB 接口分类
USB 接口粗略地可以分成三种,分别是 A 型,B 型和 C 型接口,分别是 Type-A 接口,Type-B 接口,Mini-USB 接口,Micro-USB 接口,Micro-B SuperSpeed 接口。接下来详细进行介绍。
- Type-A 接口如下图所示,是长方形接口,广泛应用于电脑,充电器等主机设备以及 U 盘,鼠标,键盘等传统外设。

- Type-B 接口如下图所示,是方正接口,多用于打印机、麦克风、扫描仪等设备

- Mini-B 接口如下图所示,多用于行车记录仪设备。

- Micro-USB 接口如下图所示,小型接口,曾用于老款手机、移动电源等便携设备。

- Micro-B SuperSpeed 接口如下图所示,常用于移动硬盘。

- Type-C 接口如下图所示,正反可插,目前 Typec 接口是手机、笔记本电脑、耳机等现代设备的主流接口。

总结:
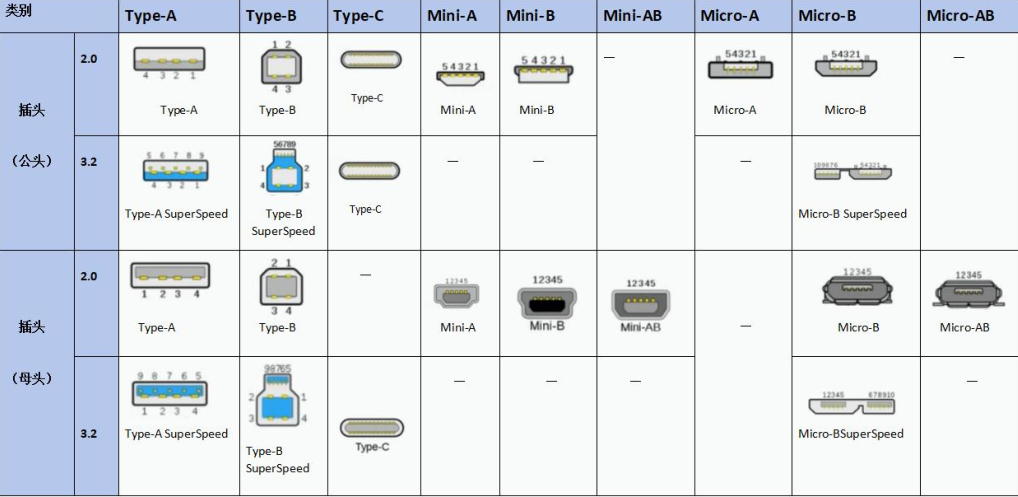
图中不同类型的 USB 接口虽然在外观和用途上有所差异,但它们都遵循 USB 标准协议,确保了设备之间的兼容性和互操作性。
这里要注意的是,不能仅因设备采用 Type - C 接口,就认定其具备高速数据传输能力。Type - C 只是一种外观规格,实际的数据传输速度,取决于所搭载的 USB 协议版本。例如,若采用 USB 2.0 协议,即便接口是 Type - C,其速度也相对有限,而 USB 3.0 及更高版本协议,才能实现高速传输。
USB 版本

最初,USB 3.0 被命名为 SuperSpeed USB,强调其高速传输的特性。后来 USB 3.1 版本发布,它在传输速率上进一步提升。
然而,为了简化命名:
- USB3.0 改名为 USB3.1 Gen 1
- USB3.1 改名为 USB3.1 Gen2。
USB-IF 推出了最新的 USB 命名规范:
- USB 3.1 Gen 1 又改名为 USB3.2 Gen1
- USB 3.1 Gen 2 又改名为 USB3.2 Gen2
- USB 3.2 Gen 2*2 为 USB3.2
经历过两次命名更改:
- USB3.0 名称为 USB 3.2 Gen 1
- USB3.1 名称为 USB 3.2 Gen 2
- USB3.2 名称为 USB 3.2 Gen 2x2
根据 USB 接口颜色一般可推断出其版本
- 黑色/白色:USB1.0/2.0
- 深蓝色:USB3.0
- 浅蓝色:USB2.0
- 红色:USB3.1
RK3568 USB接口
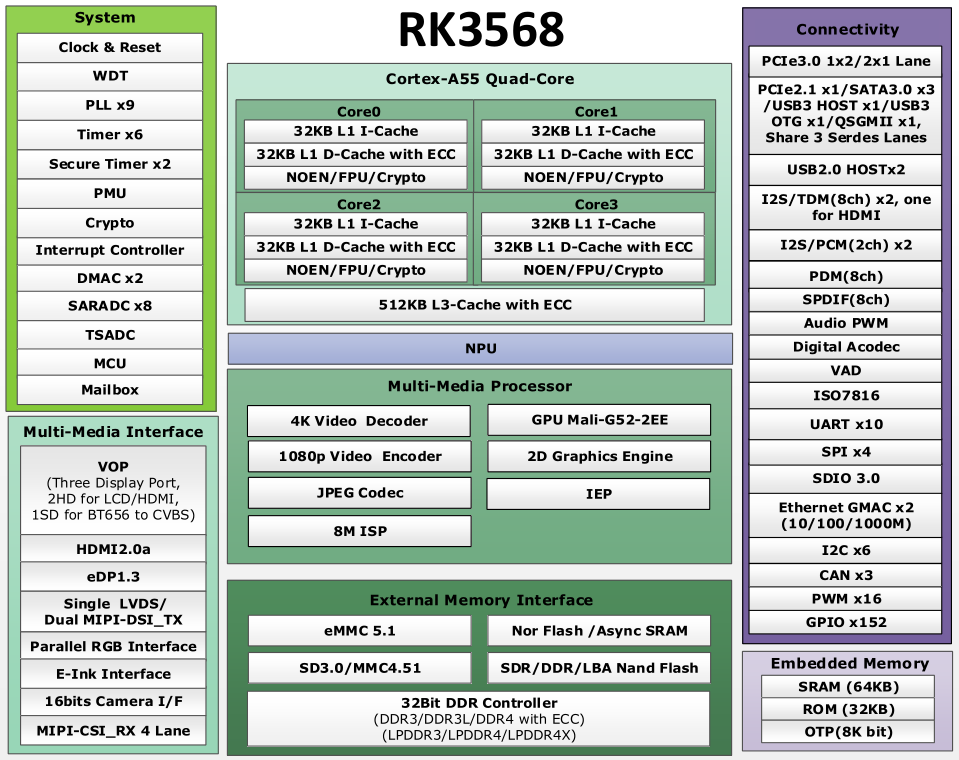
在上图中,我们可以看到 RK3568 处理器有 USB2.0 HOSTx2,一个 USB3.0 HOST 和一个 USB3 OTG。
USB 设备分为 Host(主设备) 和 Slave(从设备),只有当一台 Host 与另一台 Slave 连接时才能实现数据传输。
USB Host: USB Host是指具有 USB 主机功能的设备。USB 主设备是控制和管理 USB 总线的设备,USB 主设备通常是计算机或其他主机设备,如平板电脑,笔记本台式机等。
USB Slave: USB Slave是指具有 USB 从设备功能的设备。USB 从设备是受 USB 主机控制的设备,USB 从设备依赖与 USB 主机设备以进行数据传输和通信。USB 从设备可以是各种外围设备,如键盘,鼠标,U盘等。
USB OTG(USB On-The-Go)
指支持 USB OTG 功能的设备(即插即用),USB OTG允许设备在主设备和从设备之间进行切换,从而能够直接与其他 USB 设备进行通信,无需传统的 USB 主机设备。如通过 OTG 可以实现将摄像机和打印机直接连接。
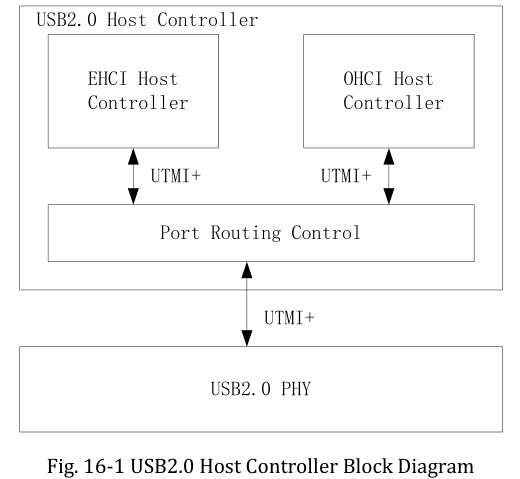
RK3568 芯片有两个 USB2.0 主机控制器,每个 USB2.0 主机控制器都通过一个增强型主机控制器接口(EHCI)主机控制器和一个开放式主机控制器接口(OHCI)主机控制器完全支持 USB2.0 功能,并且每个主机控制器都有一个 USB 端口。
-
OHCI 主机控制器仅支持全速和低速模式,用于连接全速设备和低速设备。
-
EHCI 主机控制器仅支持高速模式,用于连接高速设备。
OHCI 主机控制器和 EHCI 主机控制器共享同一个 USB 端口。EHCI 主机控制器会根据所连接设备的速度模式自动选择该 USB 端口的控制权归属(OHCI 或 EHCI)。
- 当选择 OHCI 为主控时,OHCI 主机控制器将为所连接的设备提供服务;
- 当选择 EHCI 为主控时,EHCI 主机控制器将为所连接的设备提供服务。
RK3568 芯片有两个 USB3.0 控制器,其中一种可以用作 USB3.0 OTG(On-The-Go)控制器,另一种只能用作 USB3.0 主机控制器。USB3.0 OTG 控制器可以根据 USB2.0 物理层(PHY)的输入 ID 状态,充当静态主机、静态设备、USB2.0/3.0 OTG A 设备或 B 设备。它能够在主机和设备之间以主机或设备的身份进行 SuperSpeed(超高速)、High-Speed(高速)、Full-Speed(全速)或 Low-Speed(低速)的数据传输。
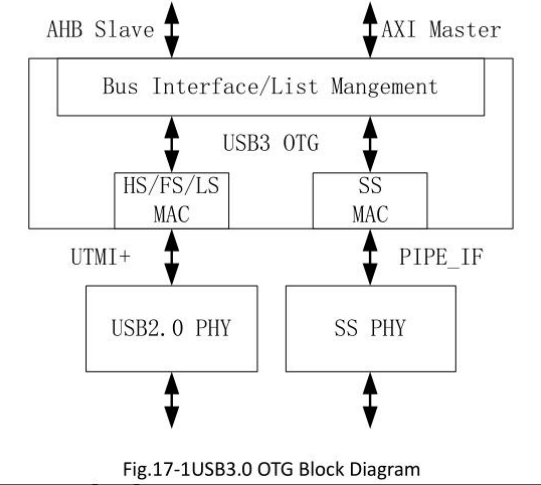
从上图中可以看出,USB3 OTG 模块通过 HS/FS/LS MAC(高速/全速/低速 MAC)接口连接到下方的 USB2.0 PHY 模块。USB2.0 PHY 模块负责 USB2.0 的物理层功能。USB3 OTG 模块通过 SS MAC(超高速 MAC)接口连接到右侧的 SS PHY 模块。SS PHY 模块负责超高速(SuperSpeed)的物理层功能。
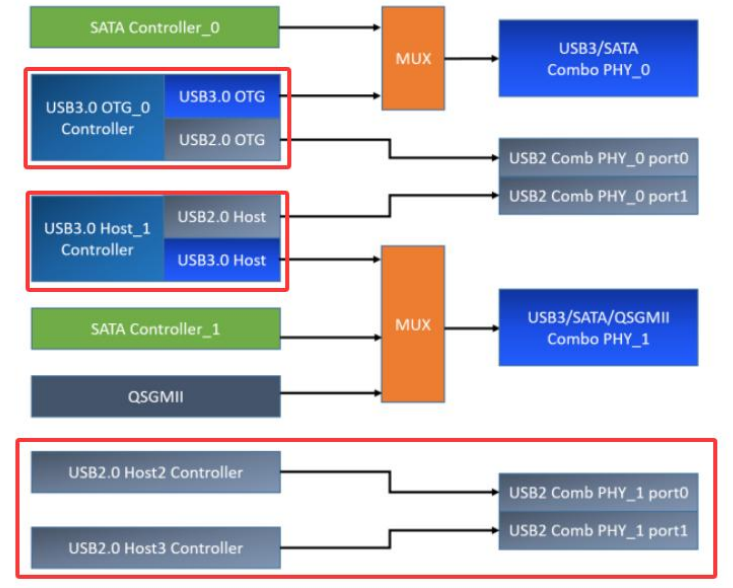
从上述图示可知,RK3568 芯片配备两个 USB2.0 HOST,其 USB2.0 HOST 引脚不存在复用情况,USB 2.0 Host_2 控制器与 USB 2.0 Host_3 控制器分别使用 USB 2.0 Comb PHY_1 的 port0 和 port1。
同时,该芯片设有一个 USB3.0 OTG,它能向下兼容 USB2.0 OTG,且此 USB 3.0 OTG 控制器与 SATA_0 控制器复用 USB3/SATA Combo PHY_0。
另外,RK3568 芯片还有一个 USB3.0 HOST,它向下兼容 USB2.0 HOST,USB 3.0 Host_1 控制器与 SATA_1/QSGMII 控制器复用 USB3/SATA/QSGMII Combo PHY_1。
USB 3.0 OTG 控制器与 USB 3.0 Host_1 控制器分别使用 USB 2.0 Comb PHY_0 的 port0 和 port1。
topeet RK3568 USB
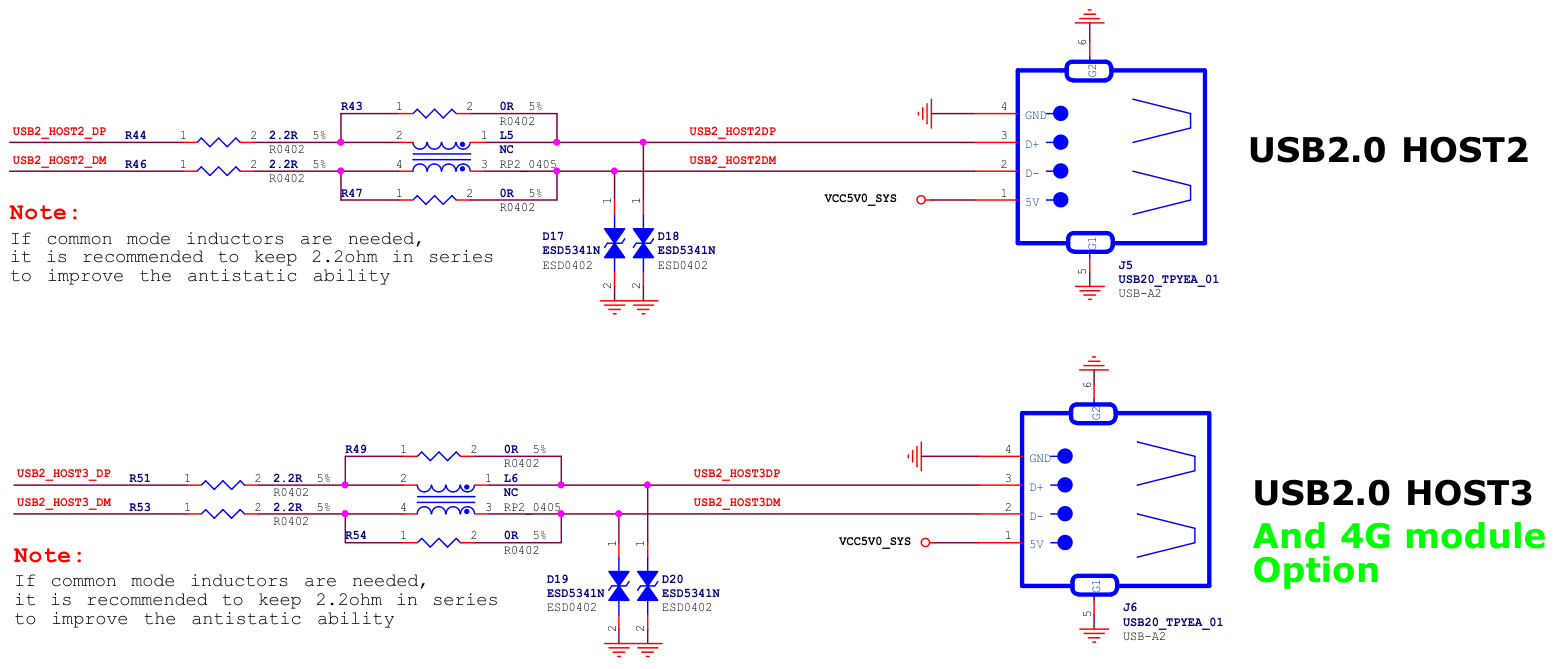
两个 USB2.0 接口,其中下面的是 RTL8723DU WIFI 模块是复用的
开发板上还有一个 USB3.0 OTG 接口,原理图如下图所示:
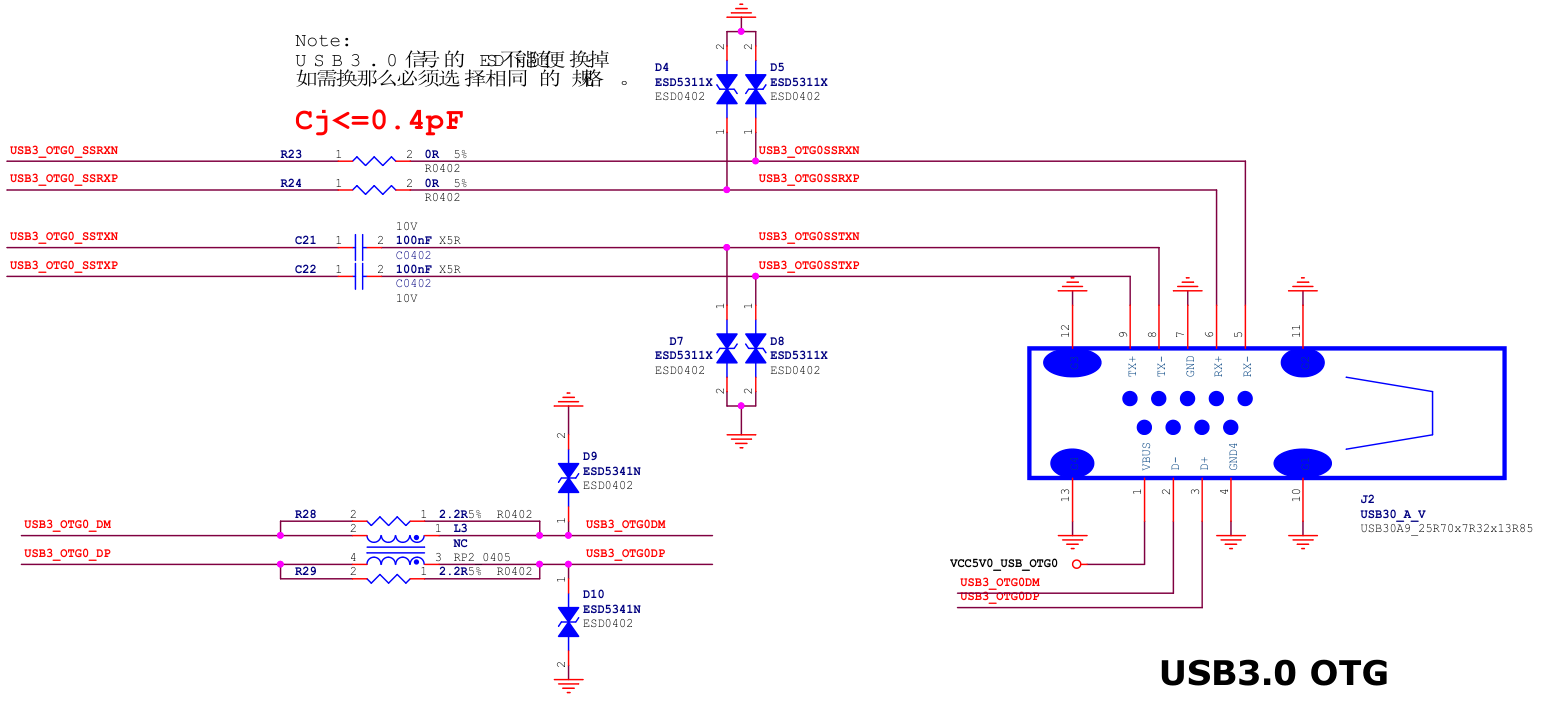
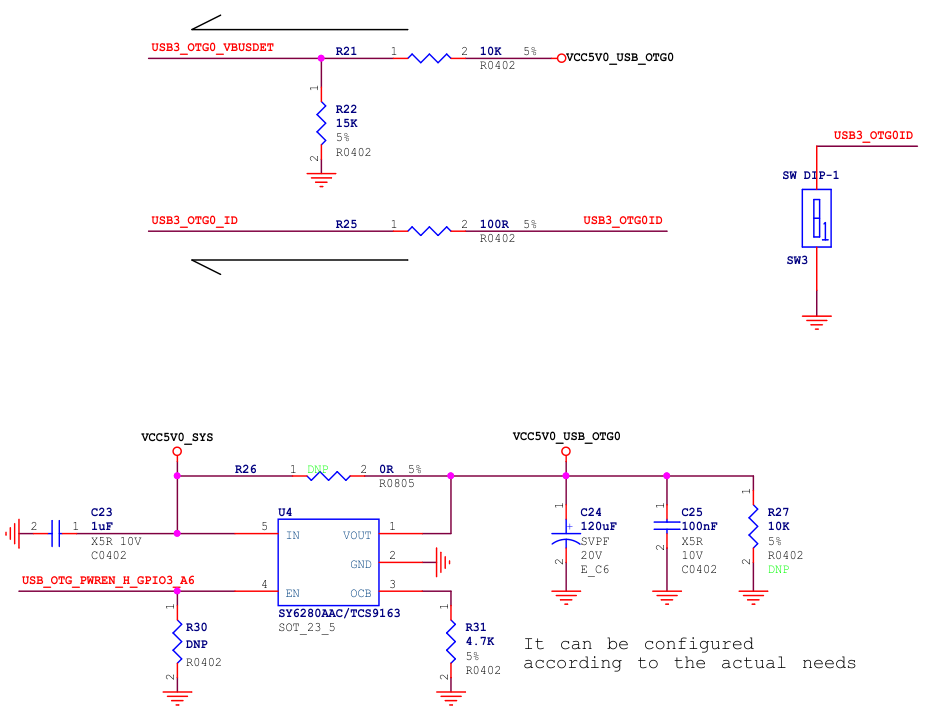
在上面的原理图中,USB3_OTG0_VBUSDET 是一个高电平有效的检测信号,用于 OTG 和 Device 模式识别。usb3.0 otg 支持三种模式,分别是 otg 模式,device 模式,host 模式
- OTG 模式下:通过检测 ID 引脚电平自动切换工作模式(高电平为 Device 模式,低电平为 Host 模式),同时需要 VBUSDET 为高电平才会拉高 USB3_OTG0DP 开始枚举;
- Device 模式下:只需 VBUSDET 为高电平即可触发枚举,无需检测 ID 引脚;
- Host 模式下:完全忽略 ID 和 VBUSDET 状态。需要注意的是,虽然某些产品可能仅需 Host 模式,但由于 USB3_OTG0_DP/DM 接口同时承担系统固件烧写和 ADB 调试功能,在调试和生产时必须切换为 Device 模式,因此必须保留 VBUSDET 信号连接。
系统默认在 uboot 启动前为 Device 模式,进入 uboot 后可根据实际需求配置这三种工作模式。
RK3568 芯片还配备了一个 USB3.0 HOST 接口。通过查看底板原理图可以发现,原理图如下所示,这个 USB3.0 HOST 接口是专门为 5G 模块(RM500U-CN 模块)预留的。在 iTOP-RK3568 开发板上,4G 和 5G 模块共用同一个 U58 座子,通过硬件设计实现了兼容。
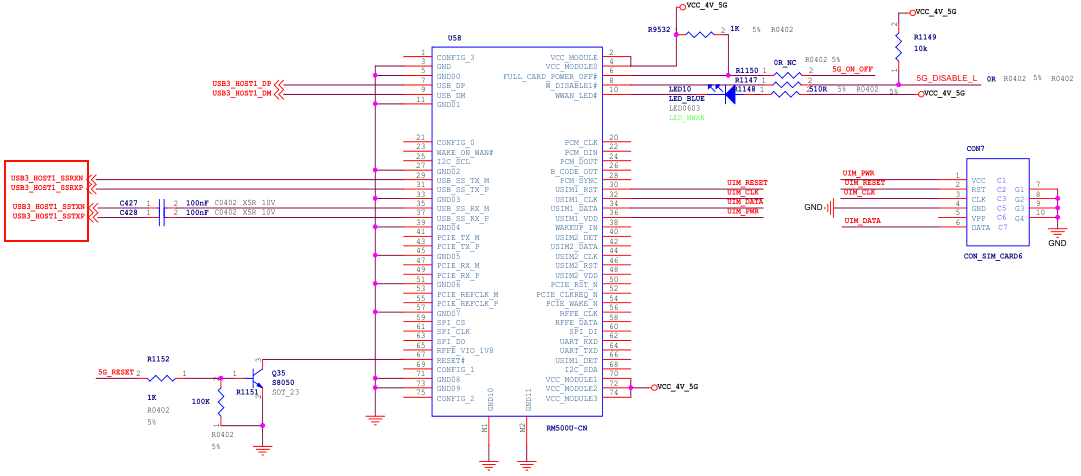
USB 总线架构与设备交互机制
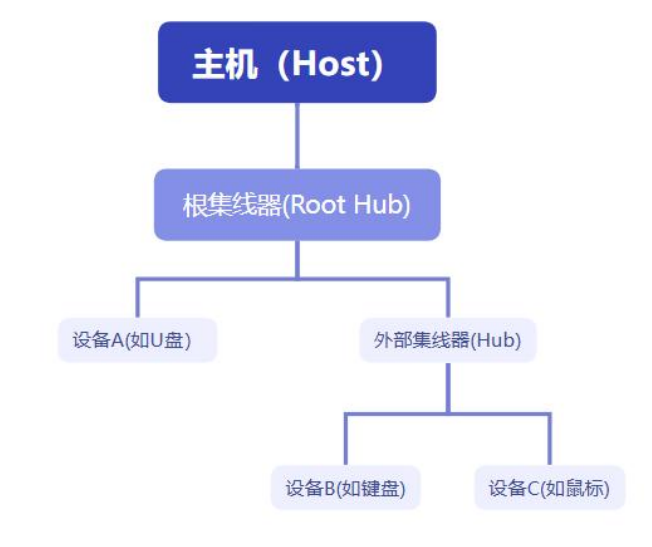
USB 拓扑结构
USB 采用树形拓扑结构,是一种主从结构,即所有设备通过集线器(hub)连接到主机(host),形成一个树状结构,如下图所示。USB 只能主机和设备之间进行数据通信,设备和设备之间是不可以通信的
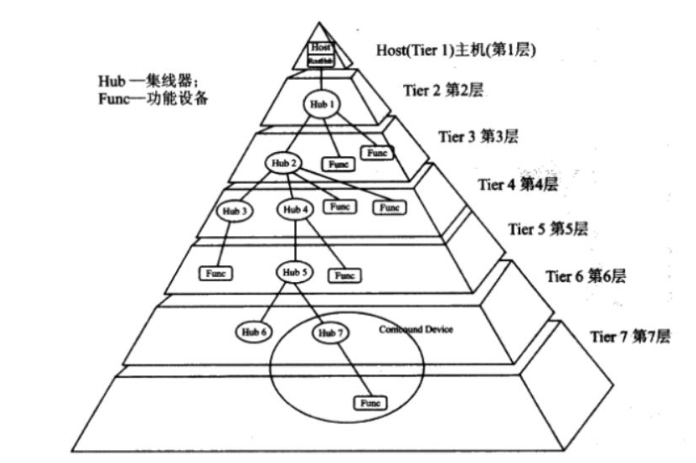
USB 集线器虽然能够扩展接口数量,但其扩展能力受到严格限制。根据 USB2.0 协议规范,整个系统最多支持 7 层级联扩展(从根集线器开始计算),且所有连接的设备总数不得超过 127 个(包括集线器本身,0地址有特殊作用)。这种金字塔形的拓扑结构设计(如下图所示)在保证接口扩展灵活性的同时,通过层级限制避免了信号衰减和系统过载的问题。
USB 设备状态迁移
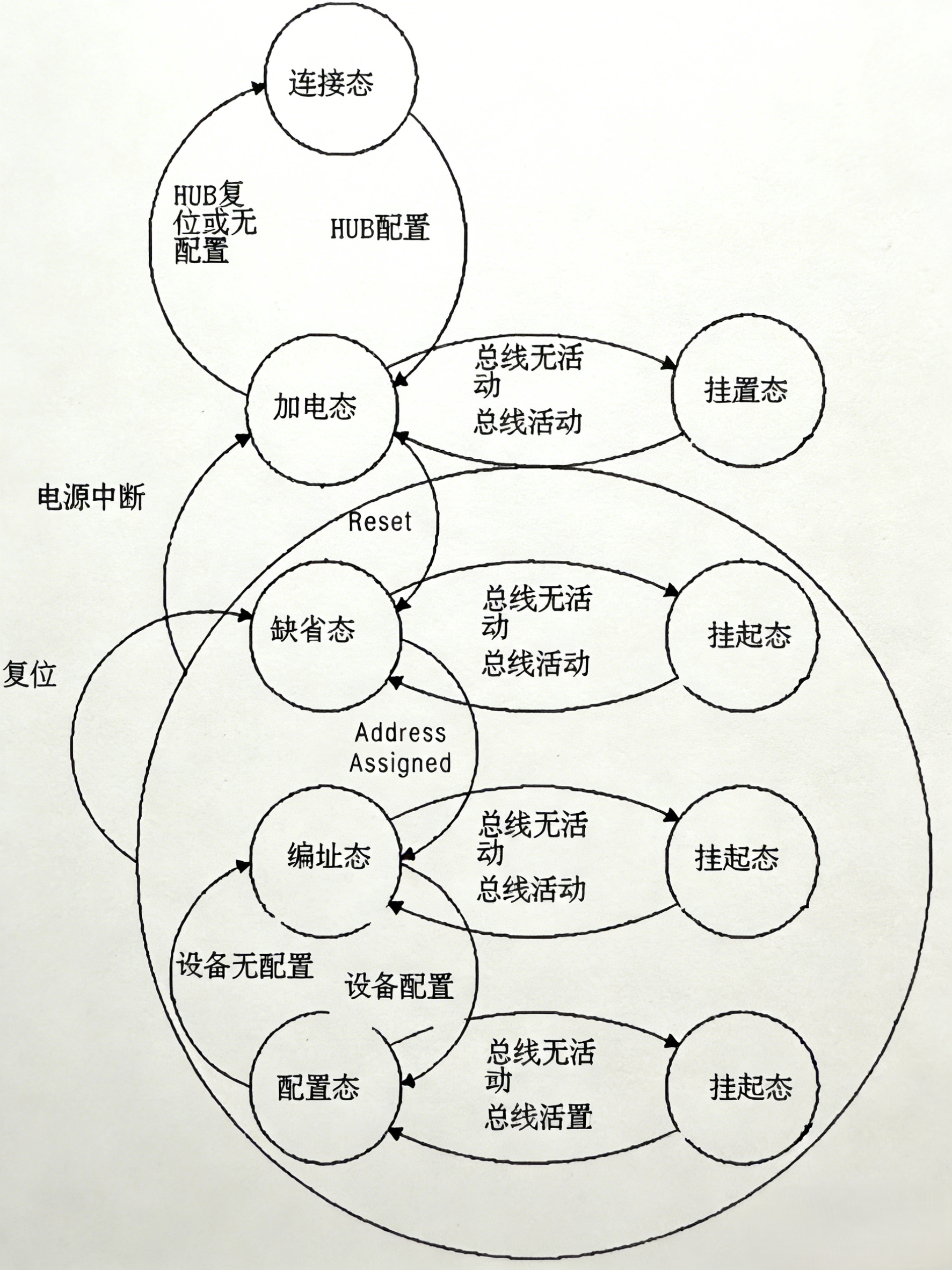
从 USB 设备尚未接入,到被 USB Host 完全识别并确保其功能正常,USB 设备会依次历经以下阶段。
- 连接状态(Attached): 这是设备物理连接到 USB 主机但还没有通电的阶段。这个阶段主要由硬件来保证。
- 上电状态(powered): 这是第二阶段,对应连接到 USB 主机并刚刚通电的设备。这个阶段主要由硬件来保证。
- 默认状态(Default): 当 USB 设备首次连接到主机时,它进入默认状态,在默认状态下,设备等待主机发送复位信号。
- 地址状态(Address): 在接收到复位信号之后,设备进入地址状态。在此状态下,主机为设备分配一个唯一的地址。
- 配置状态(Configured): 一旦设备接收到其地址,它就进入配置状态。在此状态下,设备可以选择其配置描述符,这决定了它如何与主机通信。
- 挂起状态(Suspend): 当 USB 设备不活动或主机进入低功耗模式时,设备可以进入挂起状态。在挂起状态下,设备不消耗或消耗极少的电力。
USB 设备硬件识别
USB HOST 是如何检测到 USB 设备插入呢?
USB2.0 向下兼容 USB1.0 和 USB1.1,分为低速(Low-speed),全速(Full-speed),高速(High-speed)三种模式。
- 全速设备
全速设备通过以下的方式连接,如下图所示,左侧是 USB 主机端,右侧是 USB 设备端。
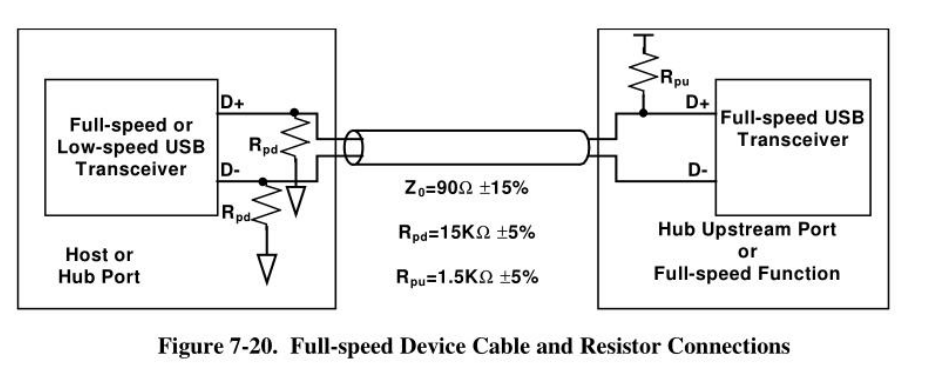
如上图所示,在左边 hub 一侧,数据线 D+和 D-都有 15k 阻值的下拉电阻 Rpd (Pull-down Resistors),在右边设备端一侧,数据线 D+上有一个 1.5k 阻值的上拉电阻 Rpu (Pull-up Resistors)。
当 D+ 信号线由低电平变成高电平,USB 主机端可以判断全速设备被插入了。
- 低速设备
低速设备通过以下的方式连接,如下图所示,左侧是 USB 主机端,右侧是 USB 设备端。

如上图所示,在左边 hub 一侧,数据线 D+和 D-都有 15k 阻值的下拉电阻 Rpd (Pull-down Resistors),在右边设备端一侧,数据线 D-上有一个 1.5k 阻值的上拉电阻 Rpu (Pull-up Resistors)。
当 D- 信号线由低电平变成高电平,USB 主机端可以判断低速设备被插入了。
- 高速设备
高速设备接入系统时,起初会被识别为全速设备。随后,HOST 会对 DEVICE 进行检测,判断其是否为高速设备,在此过程中,HOST 与 DEVICE 需相互确认。确认完成后,系统才会切换到高速模式。在高速模式下采用电流传输模式,此时需要断开 D+ 上的上拉电阻。
当设备断开连接时,其差分终端电阻随即消失,然而高速数据包仍会继续从原本设备所连端口传输。当这些数据包抵达无负载的路径端点,会产生强烈反射,反射信号返回集线器接口,致使集线器连接端口的差分电压升高。当高速设备 D+ 与 D- 上的差分信号电平大于 625mV 时,便可判定 USB 设备已断开
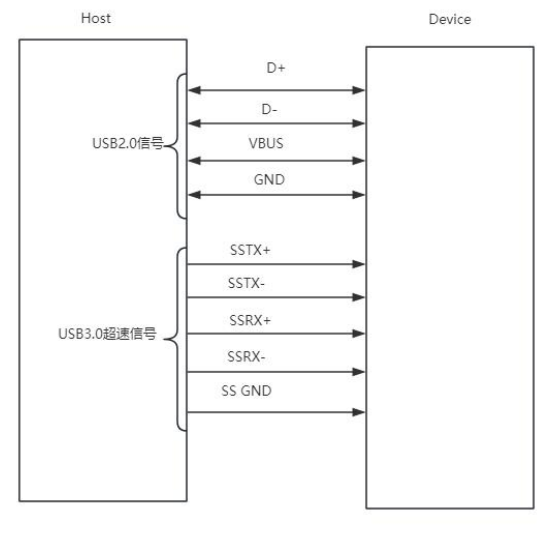
当 USB 主机和 USB 设备连接之后,会在 USB 主机和设备的 SSRX+/-上产生一个等效下拉电阻 R_Term,其范围在 18~30 欧姆,由 SSRX+/-上各一个 50 欧姆的等效下拉电阻并联组成。
下图中左边电路为不接设备时的等效电路,右边电路为接入 usb 设备时的等效电路。
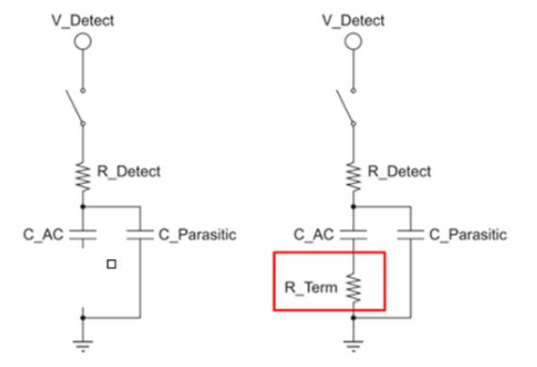
由上图可知,左边不接设备时,电路模型实际为 RC 串联电路,充放电时间常数 T = R_Detect * C_Parasitic。右边接设备时,此时 R_term 存在,充放电时间常数T=(R_Detect+R_Term)(C_AC+C_Parasitic)。显然,后者远远大于前者,所以是否连接设备可以根据时间常数来进行判断。
OTG 双角色切换
USB OTG 既能充当 HOST,又能扮演 Device 。
topeet RK3568 OTG 接口电路原理图如下图所示:
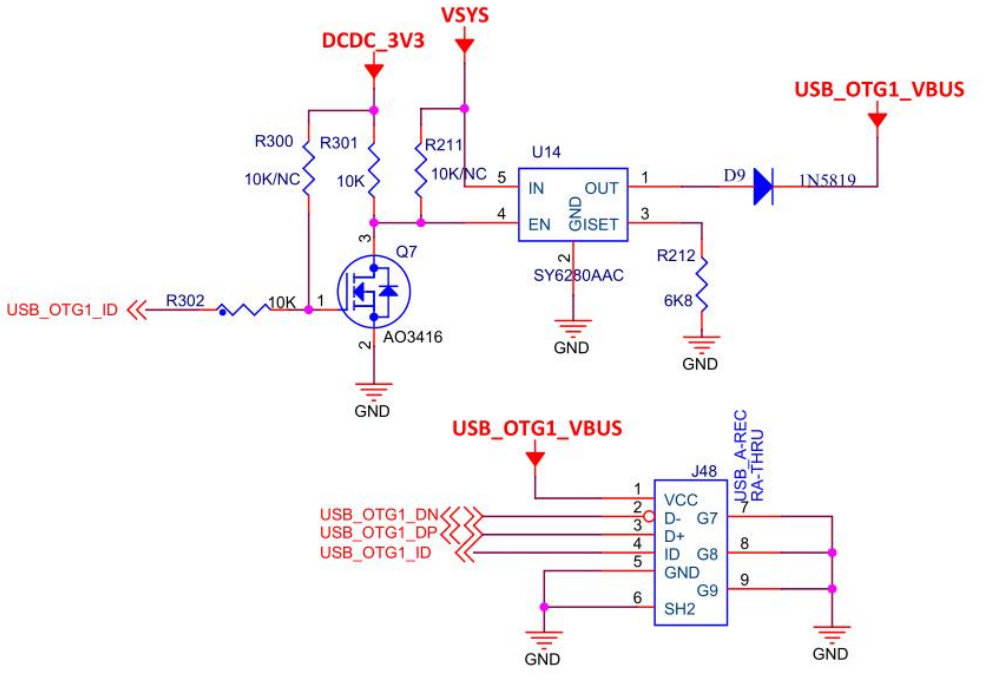
从上图可以看出,J48 为 USB 插座,USB OTG 接口中有 5 条线:2 条用来传送数据(D+、D-)、1 条电源线(VBUS)、1 条接地线(GND)、1 条 ID 线。其中 ID 线用于实现 OTG 功能,通过 ID 线来判断当前连接的是主设备(HOST)还是从设备(SLAVE)。
-
如果连接的是一个从设备(比如 U 盘),开发板的 USB 设备作为主设备,ID 引脚会被拉低。
- 当
USB_OTG1_ID引脚为低电平(即开发板作为主设备)时,Q7 截止,U14 的 EN 引脚为高电平,USB_OTG1_VBUS输出 5V 电压给从设备供电。
- 当
-
如果连接的是一个主设备(比如电脑),开发板的 USB 设备作为从设备,ID 引脚会保持高电平。
- 当
USB_OTG1_ID引脚为高电平(即开发板作为从设备)时,Q7 导通,U14 的 EN 引脚为低电平,U14 停止工作,USB_OTG1_VBUS不会输出 5V 电压。
- 当
iTOP-RK3399 底板上 typec 接口如下
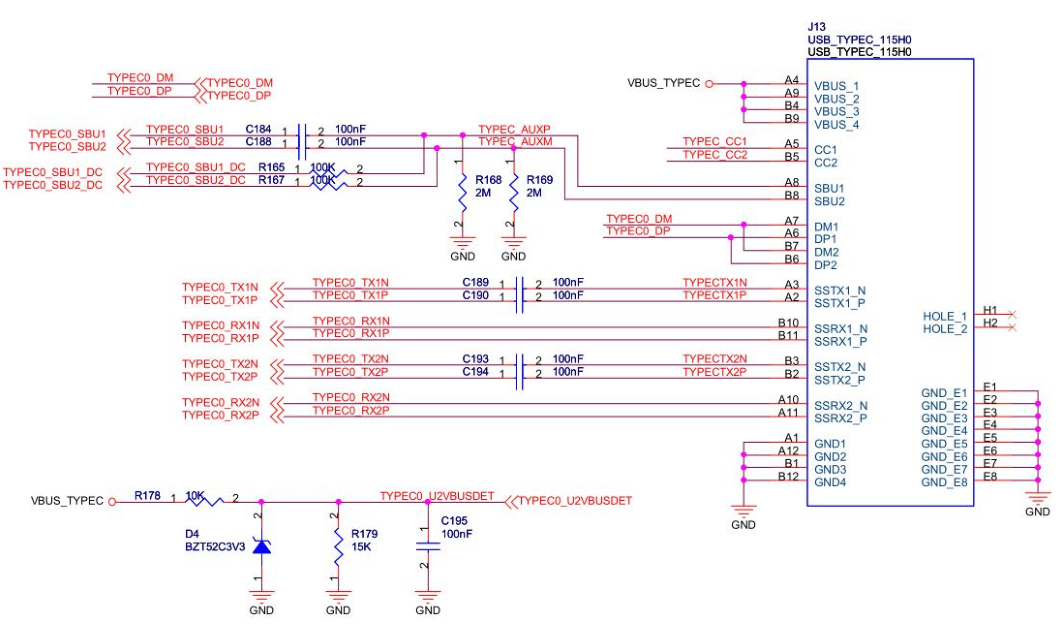
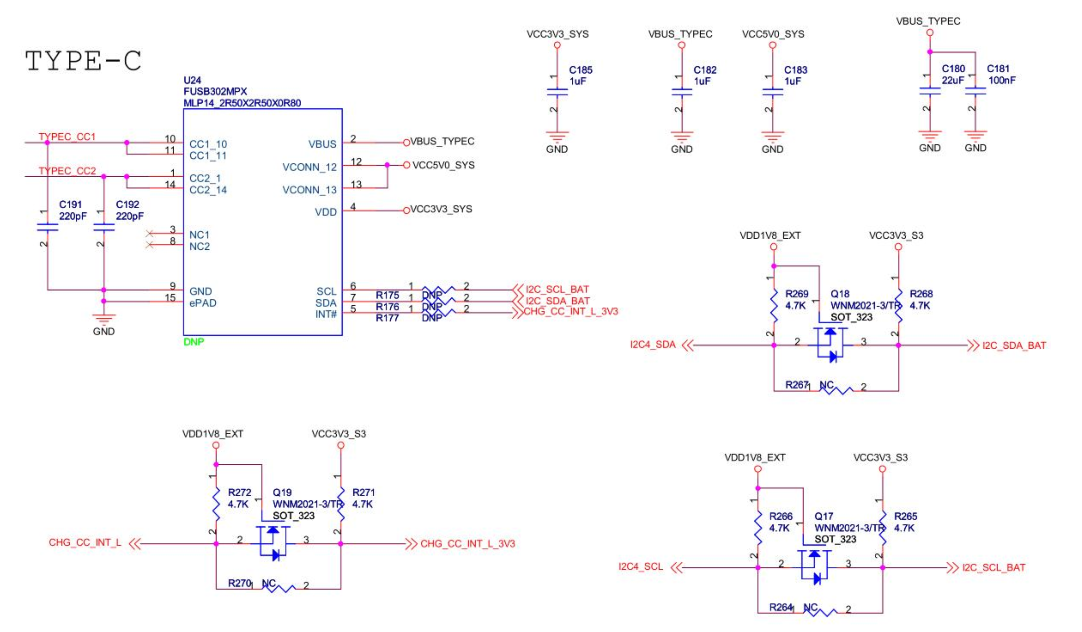
上图中 Typec_CC1 和 Typec_CC2 引脚作为 ID 引脚来使用,其工作原理和前文所述相似。U24 芯片在检测到 CC1 和 CC2 的状态后,会向主控发出中断信号,并通过 I2C 引脚读取芯片寄存器的值。随后,主控根据这些信息来控制供电引脚。
USB 协议
USB 描述符
USB 描述符是描述 USB 设备信息的结构体。主机通过读取这些描述符来识别设备类型、功能、配置等信息,从而正确加载驱动程序并进行通信。USB 描述符主要有:
- 设备描述符(Device Descriptor)
- 配置描述符(Configuration Descriptor)
- 接口描述符(Interface Descriptor)
- 端点描述符(Endpoint Descriptor)
设备描述符
设备描述符包含了设备的基本信息,比如设备的厂商 ID,产品 ID 等。设备描述符是设备连接到主机时第一个被请求和返回的信息,提供了设备的基本特征。在 Linux 内核中,USB 设备用 usb_device 结构体来描述,USB 设备描述符定义为 usb_device_descriptor 结构体,设备描述符结构体如下所示
1 | // include/uapi/linux/usb/ch9.h |
配置描述符
配置描述符描述了设备支持的不同配置,包括接口数量,配置编号,供电信息等等。每个 USB 设备都必须有一个配置描述符。另外一个 USB 设备还可以有多个配置,但是每次传输过程仅使用其中的一个配置信息来完成。USB 配置在内核中使用 usb_host_config 结构体描述,而 USB 配置描述符定义为结构体 usb_config_descriptor,配置描述符结构体如下所示:
1 | // include/uapi/linux/usb/ch9.h |
接口描述符
接口描述符描述了配置中的一个接口的特性,包括接口的端点个数,所属的设备类和子类等。一个 USB 配置有 1 个或多个接口描述符。USB 接口在内核中使用 usb_interface 结构体描述,而 USB 接口描述符定义为结构体 usb_interface_descriptor,接口描述符结构体如下所示:
1 | // include/uapi/linux/usb/ch9.h |
端点描述符
端点描述符描述接口中的一个端点,端点是数据在设备和主机之间传输的终点。一个具体的端点只能属于四种传输模式中的一种。一个 USB 接口有 0 个或多个端点描述符(不包括端点 0)。在 Linux 内核中,USB 端点使用 usb_host_endpoint 结构体来描述,而 USB 端点描述符定义为 usb_endpoint_descriptor 结构体,端点描述符结构体如下所示:
1 | // include/uapi/linux/usb/ch9.h |
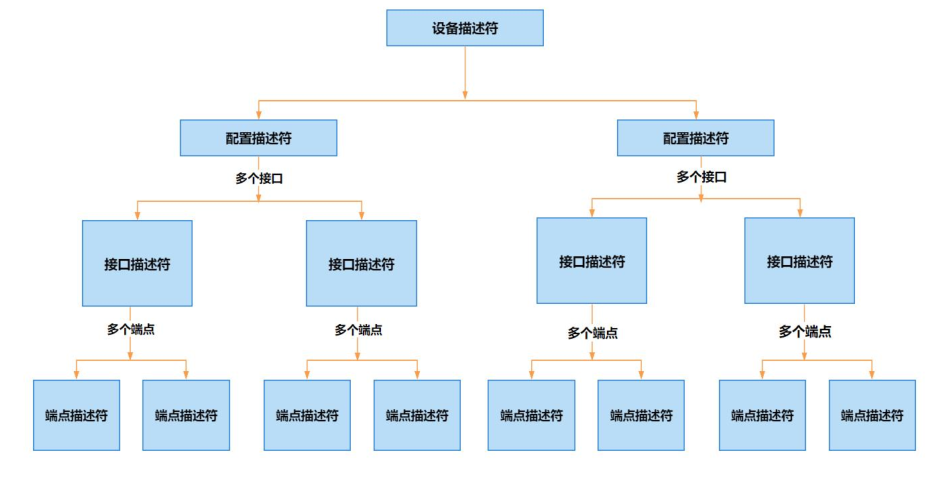
一个 USB 设备有一个设备描述符,设备描述符里面决定了该设备有多少种配置,每种配置对应着配置描述符;而在配置描述符中又定义了该配置里面有多少个接口,每个接口有对应的接口描述符;在接口描述符里面又定义了该接口有多少个端点,每个端点对应一个端点描述符;端点描述符定义了端点的大小,类型等等。由此我们可以看出,USB 的描述符之间的关系是一层一层的,最上一层是设备描述符,下面是配置描述符,再下面是接口描述符,再下面是端点描述符,如下图所示:
比如:
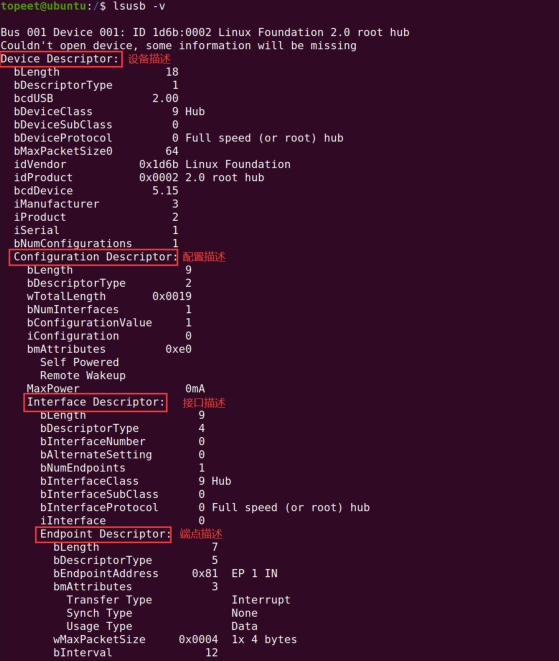
可以看出 root hub 包含了一个设备描述符,一个配置描述符,一个接口描述符,一个端点描述符。图中的信息内容直接对应于 usb_device_descriptor 、usb_config_descriptor 、usb_interface_descriptor、usb_endpoint_descriptor 结构体。
USB 通信数据格式
USB 通信数据格式以包(Packet)为基本单位,通过分层结构(域->包->事务->传输)实现设备与主机间的可靠通信。
域
域是 USB 数据的最小单位,由不同功能的二进制位组成,共 7 种类型,如下表所示
| 域类型 | 作用 | 长度 | 示例 |
|---|---|---|---|
| 同步域(SYNC) | 同步时钟,确保收发端时钟对齐 | 8 位(全速 / 低速)或 32 位(高速) | 0000 0001(全速) |
| 标识域(PID) | 标识包类型(如令牌、数据、握手包),包含 4 位有效码 + 4 位反码校验 | 8 位 | 0001 1000(OUT 包) |
| 地址域(ADDR) | 设备地址(7 位),支持最多 127 个设备 | 7 位 | 0101 010(地址 5) |
| 端点域(ENDP) | 端点号(4 位),每个设备最多 16 个端点 | 4 位 | 0001(端点 1) |
| 帧号域(FRAM) | 帧编号(11 位),每 1ms(全速)或 125μs(高速)递增,用于同步 | 11 位 | 0x7FF(最大帧号) |
| 数据域(DATA) | 传输数据(0-1024 字节),长度由传输类型决定 | 0-1024 字节 | 0x01 0x02 0x03 |
| 校验域(CRC) | 错误校验,令牌包和数据包使用不同算法 | 5 位(令牌包)或 16 位(数据包) | CRC-5 或 CRC-16 |
包
USB 就像一条只能排队的快递传送带(串行通信),数据(域)必须一个比特一个比特地排队往前送。
为了让数据不迷路,USB 会先把数据打包成一个个小包裹(数据包),再通过四种不同形状的“快递盒子”(包结构)来区分用途——比如装文件的、传指令的、发数据的等等,确保每个包裹能准确送到目的地。
这四种不同形状的“快递盒子”相当于四种不同的包结构,分别是令牌(Token)包、数据(Data)包、握手(Handshake)包和特殊(Special)包。
这四种包结构通过标识符 PID 来区分,在 USB 包中,PID 域使用 8 位来表示,格式如下所示:
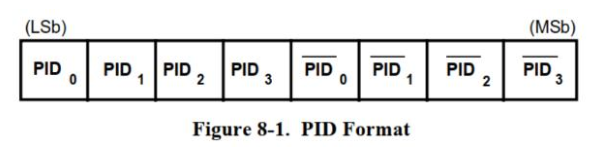
前 4 位表示 PID,后 4 位是对前 4 位的取反。前 4 位 PID 中使用 bit1,bit0 确定分类,使用 bit3,bit2 进一步细分,如下表所示:
| PID 类型 | PID 名 | PID[3:0] | 说明 |
|---|---|---|---|
| 令牌类 | OUT | 0001B | 通知设备将要输出数据 |
| IN | 1001B | 通知设备将要输入数据 | |
| SOF | 0101B | 通知设备这是一个帧起始包 | |
| SETUP | 1101B | 通知设备将要开始一个控制传输 | |
| 数据类 | DATA0 | 0011B | 不同类的数据包 |
| DATA1 | 1011B | ||
| DATA2 | 0111B | ||
| MDATA | 1111B | ||
| 握手类 | ACK | 0010B | 确认 |
| NACK | 1010B | 不确认 | |
| STALL | 1110B | 挂起 | |
| NYET | 0110B | 未准备好 | |
| 特殊类 | PRE | 1100B | 前导,这是一个令牌包 |
| ERR | 1100B | 错误,这是一个握手包 | |
| SPLIT | 1000B | 分裂事务(这是一个令牌包) | |
| PING | 0100B | PING 测试(这是一个令牌包) | |
| Reserved | 0000B | 保留,未使用 |
一个完整的数据包由多个不同的域组成。
所有数据包都以同步域(SYNC)开场,紧接着是包标识符(PID),最后以包结束(EOP)信号收尾。不同类型的数据包,中间的位域各有不同,常见的有包目标地址(ADDR)、包目标端点(ENDP)、数据、帧索引以及 CRC 等。具体每个数据包的结构,需要根据实际情况来分析。
事务
USB 传输的基本单位是包(Packet),包的类型由 PID 表示。一个单纯的包,是无法传输完整的数据的。比如想要输出数据,可以发出 OUT 令牌包,因为 OUT 令牌包能够指定目的地。但仅靠 OUT 令牌包还不够,数据传输还需要发出 DATA0 或 DATA1 数据包。
当设备收到数据后,还需回复一个 ACK 握手包。所以,完整的数据传输需要涉及多个包,包括令牌包、数据包、握手包,这个完整的数据传输过程被称为事务(Transaction)。事务存在不同类型,有些事务需要握手包,有些事务不需要握手包;有些事务能够传输大量数据,而有些事务只能传输少量数据。
有四类事务,分别是:
- 批量事务
批量事务用来传输大量的数据,数据的正确性有保证,时效没有保证。
- 中断事务
中断事务用来传输周期性的,小量的数据,数据的正确性和时效都有保证。
- 实时事务
实时事务用来传输实时数据,数据的正确性没有保证,时效有保证。
- 建立事务
建立事务跟批量事务类似,只不过令牌包是 SETUP 令牌包。
USB 传输方式
- 控制传输是 USB 协议中最基本的一种数据传输方式,主要用于进行查询、配置和给 USB 设备发送通用的命令。控制传输是双向传输,数据量通常比较小。控制传输由建立事务、批量事务组成,所有的 USB 设备都必须支持控制传输。
- 同步传输用于传输大量的、速率恒定的,且对服务周期有要求的数据。一般来说,同步传输常用于音频和视频类设备,因为这些设备需要实时性比较高。同步传输使用实时事务实现数据传输。
- 中断传输适用于传输少量或者中量的数据,要求具有固定的事务处理周期。一般来说,USB 中断传输常应用于 USB 鼠标、USB 键盘等 HID 人机交互设备中,因为这些设备要求响应快,具有固定的事务处理周期,但对数据的需求比较低,这正是 USB 中断传输的优势。中断传输是使用中断事务实现数据传输。
- 批量传输也叫 USB 块传输。批量传输适合于传输大量的数据,要求传输正确,但对传输时间和传输速率以及实时性均无要求。一般来说,批量传输用于 U 盘等存储类设备。批量传输是使用批量事务实现数据传输。
Bit 组成域(Field),域组成包(Packet),包组成事务(Transaction),事务组成传输(Transfer)。
USB 枚举
USB 设备连接到 USB 主机以后,主机使用总线枚举过程来识别和管理接入的设备。USB 枚举本质上是 USB 的 Host 与 Device 之间的信息交互过程。在此过程中,Device 向 Host 报告自身参数,Host 依据这些参数获取关键信息,从而明确设备的具体类型以及与之通信的方式。
基于所获信息,主机就可以加载适配该设备的驱动程序。USB 设备枚举过程如下所述:
- USB 设备插入 USB 接口后,主机检测
D+/D-线上的电压,确认有设备连接,USB 集线器通过中断 IN 通道,向主机报告有 USB 设备连接。 - 主机检测到 USB 设备插入之后对 USB 设备进行复位,复位后 USB 设备的地址为 0,这样主机就可以使用地址 0 与 USB 设备进行通信。
- 主机向地址 0(即刚插入的 USB 设备)的设备端点 0(默认端点)发送获取设备描述符的标准请求。USB 设备收到请求之后,将设备描述符发送给主机。主机收到设备描述符之后,返回一个 0 长度的数据确认表(ACK)。
- 主机对设备再次复位,复位后主机对地址为 0 的设备端点 0 发送一个设置地址请求数据包,新的设备地址就在这个数据包中。主机发送请求状态返回,设备返回 0 长度的状态数据包。
- 主机收到状态数据包后,发送 ACK 包给设备,设备收到 ACK 后,启用新的设备地址,以后主机通过新地址来访问该设备。
- 主机再次获取设备描述符,这次和第一次有点不一样,这次需要获取全部的 18 个字节的设备描述符。
- 接下来,主机就会获取配置描述符。主机在获取到配置描述符之后,根据里面的配置集合总长度,再获取配置集合。配置集合包括配置描述符,接口描述符,端点描述符等等。如果还有字符串描述符,系统还会获取字符串描述符。
USB 波形
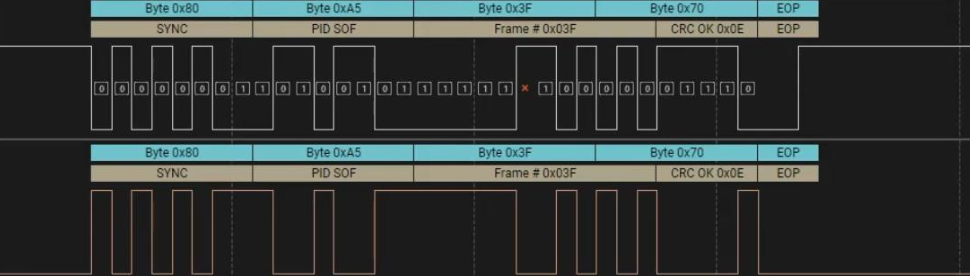
在上图中,是一个帧起始包。SYNC 域以 0x80(10000000)开头,用于表示时钟同步。PID 域值为 0xA5,图中标记为 SOF,表示这是一个帧起始包。
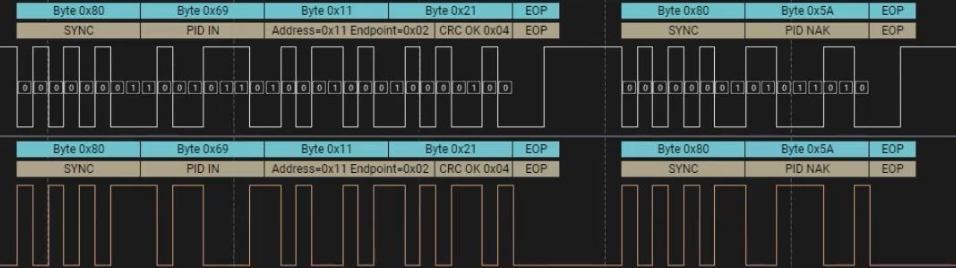
左侧是一个令牌包。SYNC 域以 0x80(10000000)开头,用于表示时钟同步。PID 域值为 0x69,图中标记为 IN,表示通知设备将要输入数据。接下来主机请求端点 2 的数据。
在上图中,右侧是一个握手包,SYNC 域以 0x80(10000000)开头,用于表示时钟同步。PID 域值为 0x5A,图中标记为 NAK,表示设备暂时无法响应。
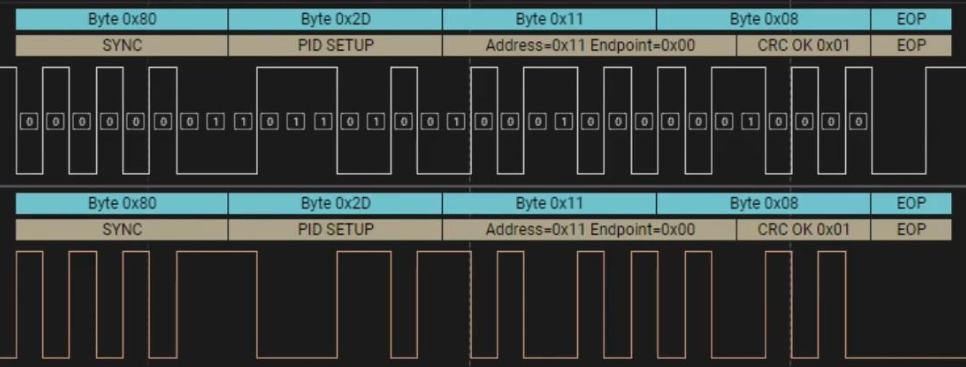
此波形为枚举阶段的控制传输请求。SYNC 域以 0x80(10000000)开头,用于表示时钟同步。PID 域为 SETUP,表示通知设备将要开始一个控制传输。接下来是地址域 Address=0x11 和端点域 Endpoint=0x00,表示主机向端点 0 发送控制请求。最后是校验域(CRC),包以 EOP 结束。
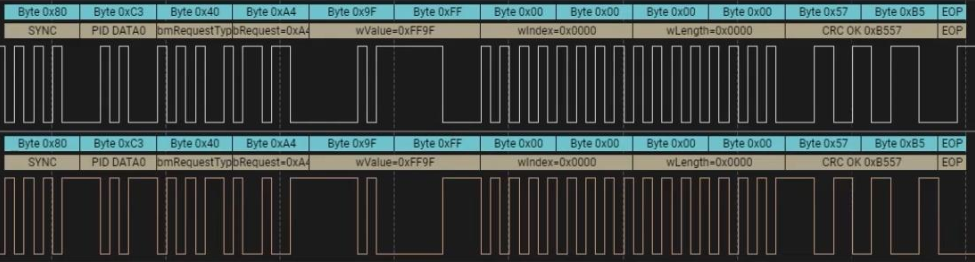
SYNC 域以 0x80(10000000)开头,用于表示时钟同步。PID 域为 DATA0,表示用于控制传输的数据阶段。
应用编程基础
libusb 库简介
libusb 是一个使用 C 编写的库,它提供 USB 设备的通用访问方法。APP 通过它,可以方便地访问 USB 设备,不需要编写 USB 设备驱动程序。libusb 库有三个特点:
- 可移植性好,支持 Linux,macOS,Windows 系统。
- 简单易用,APP 不需要特权模式,也不需要提升自己权限即可访问 USB 设备
- 支持所有的 USB 协议,从 USB1.0 到 USB3.1,并且 API 接口保持不变,方便开发
libusb 编译
源码:

本地编译
1 | sudo apt install autoconf automake libtool libudev-dev m4 |
在 libusb 源码的 examples 目录下,libusb 提供了一些官方案例,如下所示:
1 | $ ls examples |
-
hotplugtest.c用于监听系统中 USB 设备的插入和拔出。 -
listdevs.c获取并显示系统当前的 USB 设备信息,包含:VID、PID、bus 编号、设备地址、端口号。 -
testlibusb.c用于打印 usb 设备列表的详细信息:包括设备描述符、配置、接口、端点描述符。
交叉编译
1 | make distclean |
编译 examples
1 | make -C examples \ |
libusb API
libusb_init()
| 项目 | 说明 |
|---|---|
| 函数原型 | int libusb_init(libusb_context **ctx); |
| 参数 | libusb_context **ctx:上下文指针,可为 NULL 使用默认上下文 |
| 返回值 | 成功返回 0;失败返回负数错误码 |
| 函数功能 | 初始化 libusb 库,必须在其他 libusb 操作前调用 |
libusb_get_device_list()
| 项目 | 说明 |
|---|---|
| 函数原型 | ssize_t libusb_get_device_list(libusb_context *ctx, libusb_device ***list); |
| 参数 | ctx:上下文list:输出设备数组 |
| 返回值 | 成功返回设备数量;失败返回负数 |
| 函数功能 | 获取当前连接的 USB 设备列表 |
libusb_free_device_list()
| 项目 | 说明 |
|---|---|
| 函数原型 | void libusb_free_device_list(libusb_device **list, int unref_devices); |
| 参数 | list:设备列表unref_devices:是否减少引用计数 |
| 返回值 | 无 |
| 函数功能 | 释放设备列表 |
libusb_open_device_with_vid_pid()
| 项目 | 说明 |
|---|---|
| 函数原型 | libusb_device_handle *libusb_open_device_with_vid_pid(libusb_context *ctx, uint16_t vid, uint16_t pid); |
| 参数 | ctx:上下文vid:厂商IDpid:产品ID |
| 返回值 | 成功返回设备句柄;失败返回 NULL |
| 函数功能 | 根据 VID/PID 查找并打开设备 |
libusb_open()
| 项目 | 说明 |
|---|---|
| 函数原型 | int libusb_open(libusb_device *dev, libusb_device_handle **dev_handle); |
| 参数 | dev:设备指针dev_handle:输出设备句柄 |
| 返回值 | 成功返回 0;失败返回负数 |
| 函数功能 | 打开指定 USB 设备 |
libusb_get_device_descriptor()
| 项目 | 说明 |
|---|---|
| 函数原型 | int libusb_get_device_descriptor(libusb_device *dev, struct libusb_device_descriptor *desc); |
| 参数 | dev:设备desc:输出设备描述符 |
| 返回值 | 成功返回 0; 失败返回负数 |
| 函数功能 | 获取设备描述符 |
libusb_get_config_descriptor()
| 项目 | 说明 |
|---|---|
| 函数原型 | int libusb_get_config_descriptor(libusb_device *dev, uint8_t config_index, struct libusb_config_descriptor **config); |
| 参数 | dev:设备config_index:配置索引config:输出配置描述符 |
| 返回值 | 成功返回 0; 失败返回负数 |
| 函数功能 | 获取设备配置描述符 |
libusb_free_config_descriptor()
| 项目 | 说明 |
|---|---|
| 函数原型 | void libusb_free_config_descriptor(struct libusb_config_descriptor *config); |
| 参数 | config:配置描述符 |
| 返回值 | 无 |
| 函数功能 | 释放配置描述符 |
libusb_bulk_transfer()
| 项目 | 说明 |
|---|---|
| 函数原型 | int libusb_bulk_transfer(libusb_device_handle *dev_handle, unsigned char endpoint, unsigned char *data, int length, int *actual_length, unsigned int timeout); |
| 参数 | dev_handle:设备句柄endpoint:端点地址data:缓冲区length:长度actual_length:实际长度timeout:超时(ms) |
| 返回值 | 成功返回 0; 失败返回负数 |
| 函数功能 | 执行 USB 批量传输 |
libusb_interrupt_transfer()
| 项目 | 说明 |
|---|---|
| 函数原型 | int libusb_interrupt_transfer(libusb_device_handle *dev_handle, unsigned char endpoint, unsigned char *data, int length, int *actual_length, unsigned int timeout); |
| 参数 | dev_handle:设备句柄endpoint:端点地址data:缓冲区length:长度actual_length:实际长度timeout:超时(ms) |
| 返回值 | 成功返回 0; 失败返回负数 |
| 函数功能 | 执行 USB 中断传输 |
libusb_set_auto_detach_kernel_driver()
| 项目 | 说明 |
|---|---|
| 函数原型 | int libusb_set_auto_detach_kernel_driver(libusb_device_handle *dev_handle, int enable); |
| 参数 | dev_handle:设备句柄enable:1启用/0禁用 |
| 返回值 | 成功返回 0; 失败返回负数 |
| 函数功能 | 自动分离内核驱动 |
libusb_claim_interface()
| 项目 | 说明 |
|---|---|
| 函数原型 | int libusb_claim_interface(libusb_device_handle *dev_handle, int interface_number); |
| 参数 | dev_handle:设备句柄interface_number:接口号 |
| 返回值 | 成功返回 0; 失败返回负数 |
| 函数功能 | 声明设备接口 |
libusb_alloc_transfer()
| 项目 | 说明 |
|---|---|
| 函数原型 | struct libusb_transfer *libusb_alloc_transfer(int iso_packets); |
| 参数 | iso_packets:等时传输包数量 |
| 返回值 | 成功返回 transfer 指针; 失败返回 NULL |
| 函数功能 | 分配异步传输结构体 |
libusb_fill_interrupt_transfer()
| 项目 | 说明 |
|---|---|
| 函数原型 | void libusb_fill_interrupt_transfer(struct libusb_transfer *transfer, libusb_device_handle *dev_handle,unsigned char endpoint, unsigned char *buffer, int length,libusb_transfer_cb_fn callback, void *user_data, unsigned int timeout) |
| 参数 | transfer:传输对象dev_handle:设备句柄endpoint:端点buffer:缓冲区length:长度callback:回调函数user_data:用户数据timeout:超时 |
| 返回值 | 无 |
| 函数功能 | 配置异步中断传输对象 |
libusb_submit_transfer()
| 项目 | 说明 |
|---|---|
| 函数原型 | int libusb_submit_transfer(struct libusb_transfer *transfer); |
| 参数 | transfer:已配置的传输对象 |
| 返回值 | 成功返回 0; 失败返回负数 |
| 函数功能 | 提交异步传输 |
libusb_cancel_transfer()
| 项目 | 说明 |
|---|---|
| 函数原型 | int libusb_cancel_transfer(struct libusb_transfer *transfer); |
| 参数 | transfer:传输对象 |
| 返回值 | 成功返回 0; 失败返回负数 |
| 函数功能 | 取消异步传输 |
libusb_free_transfer()
| 项目 | 说明 |
|---|---|
| 函数原型 | void libusb_free_transfer(struct libusb_transfer *transfer); |
| 参数 | transfer:传输对象 |
| 返回值 | 无 |
| 函数功能 | 释放传输结构 |
libusb_handle_events()
| 项目 | 说明 |
|---|---|
| 函数原型 | int libusb_handle_events(libusb_context *ctx); |
| 参数 | ctx:上下文 |
| 返回值 | 成功返回 0; 失败返回负数 |
| 函数功能 | 处理待处理的事件(阻塞模式) |
示例
示例一
1 |
|
示例二
1 |
|
示例三
1 |
|
USB 驱动开发框架
Linux 内核中,USB 驱动开发主要分为两类:
- 主机(Host)端驱动程序
- 与设备(Device)端驱动程序。
主机端的驱动程序负责管控插入主机的 USB 设备;设备端的驱动程序负责该设备作为 USB 设备与主机通信的方式。
由于“USB devices drivers”这一表述容易引发混淆,人们通常使用“usb gadget driver(USB 器件驱动程序)”来描述 USB 设备驱动程序。
在硬件层面,主机侧和设备侧的 USB 控制器,分别被称作主机控制器(Host Controller)与 USB 设备控制器(UDC),如下图所示
1 | ┌─────────────────────┐ ┌─────────────────────┐ |
-
在 Linux 系统中,USB 驱动可以从主机侧和设备侧两个角度进行观察。从主机侧来看,USB 主机控制器驱动位于 USB 驱动最底层,负责控制硬件。在其上运行的是 USB 核心层,再上层为 USB 设备驱动。
-
从设备侧来看,USB 设备侧驱动程序有 3 层,分别是 UDC 驱动,Gadget Function API 和 Gadget Function 驱动。
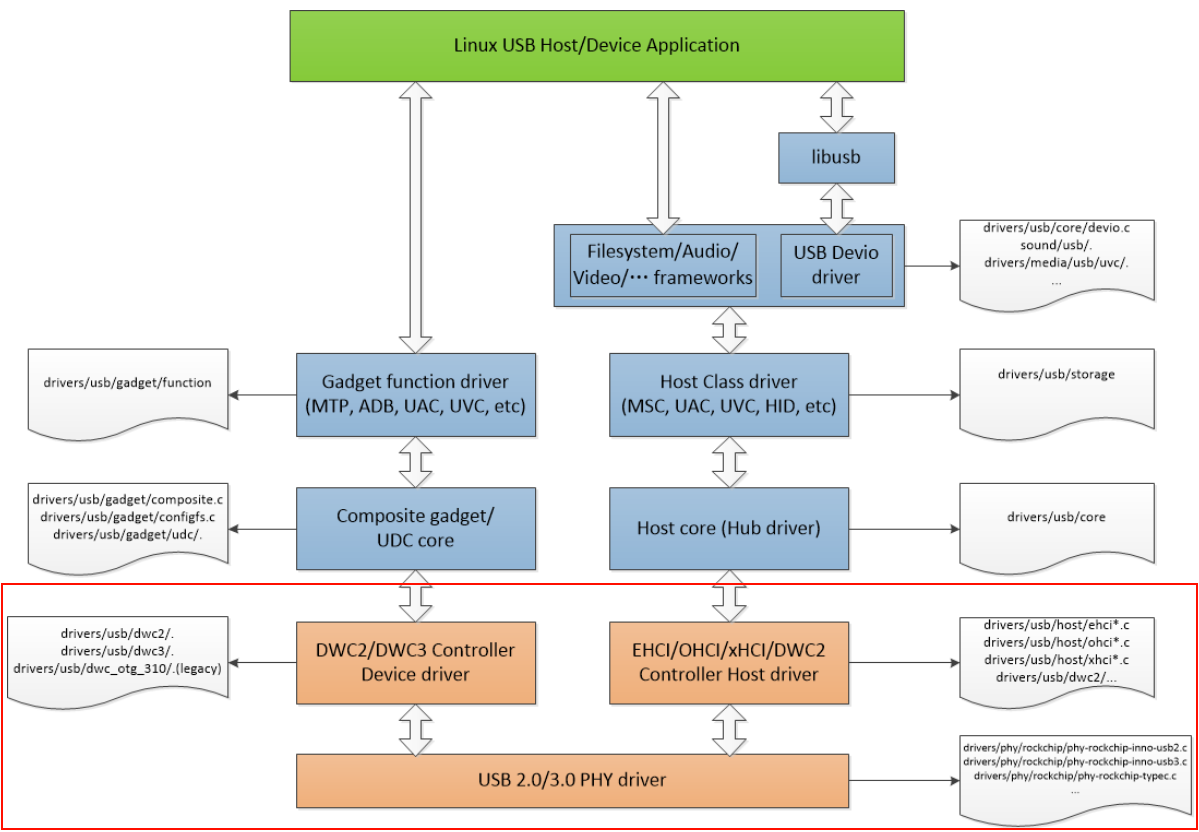
USB 驱动架构如下图所示
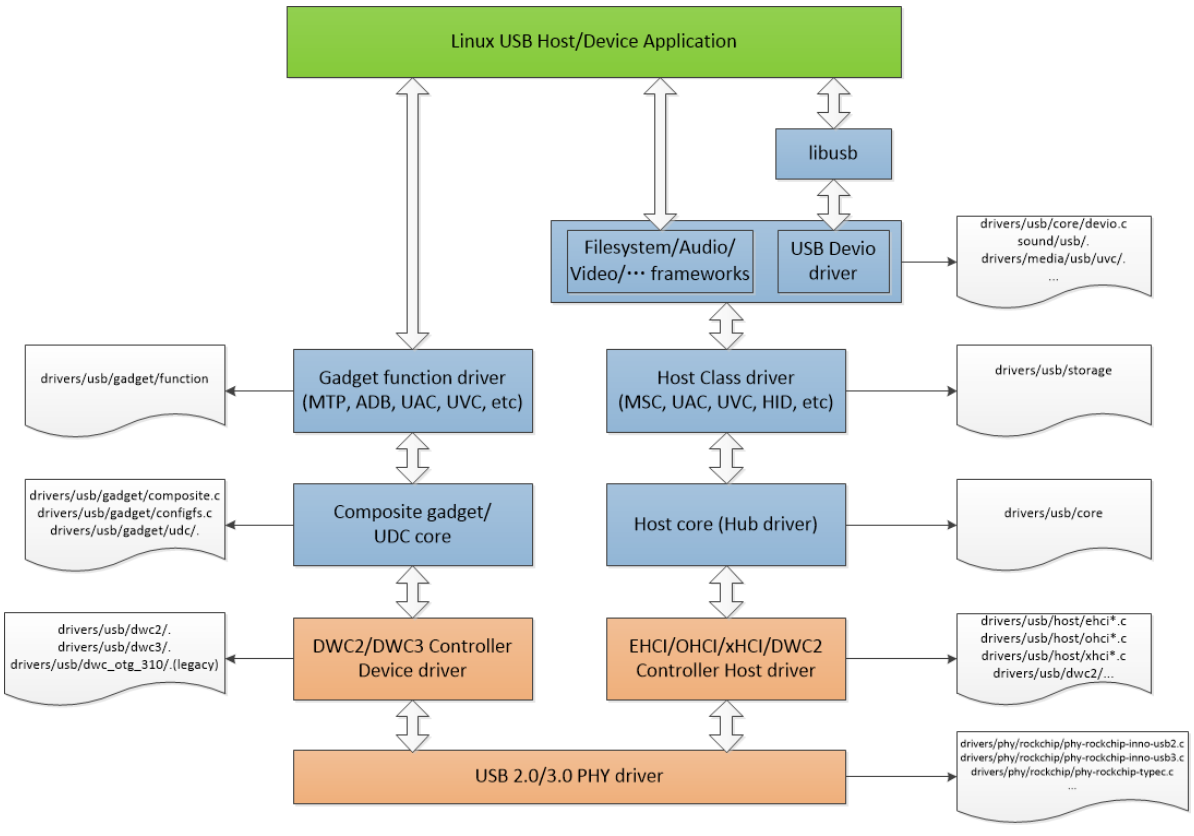
Linux USB 协议栈是一个分层的架构,左边是 USB Device 驱动,右边是 USB Host 驱动,最上层是应用层,最底层是 Rockchip 系列芯片不同 USB 控制器和 PHY 的驱动,中间是 USB 核心层。
USB 键盘驱动示例
让 iTOP - RK3568 开发板充当 USB 主机,外接如 USB 键盘之类的 USB 设备。
在 Rockchip 官方的内核源码里,USB 键盘和鼠标驱动默认处于使能状态。若要进行后续的 USB 键盘驱动程序开发实验,就需取消这一默认驱动设置。由于 USB 鼠标和键盘属于 HID 设备,我们可通过输入以下命令打开内核配置界面,进而开启或者关闭 HID 驱动。
1 | ---> Device Drivers |
将 USB HID transport layer 取消使能。
其帮助信息如下:
1 | CONFIG_USB_HID: |
struct usb_driver *driver
是驱动程序的描述结构体,其核心成员定义如下所示
1 | /** |
struct usb_device_id
在驱动的主体结构 usb_driver 中,通过.id_table 字段将设备表与驱动绑定
1 | /** |
usb_register()
| 项目 | 说明 |
|---|---|
| 函数原型 | int usb_register(struct usb_driver *driver); |
| 头文件 | #include <linux/usb.h> |
| 参数 | struct usb_driver *driver:USB 驱动描述结构体指针 |
| 返回值 | 成功返回 0; 失败返回负错误码 |
| 函数功能 | 将 USB 驱动注册到 Linux USB 子系统,使驱动能够响应匹配设备的插拔事件 |
在 usb_register 函数中,其底层调用 usb_register_driver,将驱动结构体 usb_driver 注册到内核 USB 子系统。调用 usb_register_driver 后,将 usb_driver 结构体挂载到 USB 总线(usb_bus_type)的驱动列表中,如下所示:
1 | /* use a define to avoid include chaining to get THIS_MODULE & friends */ |
usb_register_driver()
1 | /** |
usb_bus_type 结构体中有 match 成员,usb_device_match 函数负责匹配逻辑。
1 | struct bus_type usb_bus_type = { |
usb_device_match()
1 | static int usb_device_match(struct device *dev, struct device_driver *drv) |
上述函数中使用 usb_match_id 函数匹配静态设备 ID 表,usb_match_id 函数实现如下所示:
usb_match_id()
1 | /** |
上述代码中的 usb_match_one_id 函数用来判断 USB 接口是否与 usb_device_id 匹配,函数实现如下所示:
usb_match_one_id()
1 | /* returns 0 if no match, 1 if match */ |
根据 usb_device_id 中的 match_flags 字段,决定需要匹配的字段(如 VID、PID、接口类等),示例匹配表如下所示
1 | // 定义设备匹配表 |
usb_deregister()
| 项目 | 说明 |
|---|---|
| 函数原型 | void usb_deregister(struct usb_driver *driver); |
| 头文件 | #include <linux/usb.h> |
| 参数 | struct usb_driver *driver:已注册的 USB 驱动 |
| 返回值 | 无 |
| 函数功能 | 从 USB 子系统注销驱动,并触发所有匹配设备的 disconnect() 回调 |
USB Request Block
URB,即 USB Request Block,中文名为 USB 请求块。它在 USB 设备驱动里,是描述与 USB 设备进行通信时所使用的基本载体,也是核心数据结构,与网络设备驱动中的 sk_buff 结构体极为相似。URB 结构体如下所示:
1 | /** |
USB 设备中每一个端点都处理一个 URB 队列。USB 通讯步骤如下所述:
USB 通讯步骤
第一步使用 usb_alloc_urb 函数创建 URB 结构体,usb_alloc_urb 函数介绍如下所示:
1 | struct urb *usb_alloc_urb(int iso_packets, gfp_t mem_flags); |
usb_alloc_urb 函数用于创建一个 USB 请求块(URB),用于管理 USB 设备的数据传输请求。URB 是 USB 驱动开发中数据传输的核心结构体,支持以下传输类型:
- 控制传输(Control Transfer):设备初始化、配置。
- 中断传输(Interrupt Transfer):实时性要求高的设备(如键盘、鼠标)。
- 批量传输(Bulk Transfer):大容量数据传输(如 U 盘)。
- 等时传输(Isochronous Transfer):实时流数据(如摄像头、音频设备)。
函数参数:
int iso_packets: 等时传输的包数量(仅用于等时传输,其他传输类型设为 0)gfp_t mem_flags:内存分配标志,指定内存分配方式(如GFP_KERNEL、GFP_ATOMIC)
成功时返回分配的 URB 指针,失败返回 NULL。
第二步 URB 初始化,被指定用于特定 USB 设备的特定端点。对于中断 URB,使用 usb_fill_int_urb 函数来初始化 URB,usb_fill_int_urb 函数介绍如下所示:
1 | static inline void usb_fill_int_urb(struct urb *urb, // 目标 URB 指针 |
usb_fill_int_urb 函数用于初始化一个中断传输 URB。
函数参数:
struct urb *urb:要初始化的 URB 的指针struct usb_device *dev:指向这个 URB 要被发送到的 USB 设备unsigned int pipe:是这个 URB 要被发送到的 USB 设备的特定端点
pipe 参数使用下面的函数来创建
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
void *transfer_buffer:指向发送数据或接收数据的缓冲区的指针int buffer_length:是transfer_buffer指针所指向缓冲区的大小usb_complete_t complete_fn:传输完成回调函数void *context:完成处理函数的“上下文”int interval:传递给回调函数的上下文数据(通常为驱动私有结构体指针)
对于批量 URB,使用 usb_fill_bulk_urb()函数来初始化。对于控制 URB,使用 usb_fill_control_urb() 函数来初始化。
在完成第一步和第二步创建和初始化 URB 之后,URB 便可以提交给 USB 核心了,使用 usb_submit_urb 函数来完成。usb_submit_urb 函数介绍如下所示
1 | int usb_submit_urb(struct urb *urb, gfp_t mem_flags); |
函数作用:
将初始化好的 USB 请求块(URB)提交给内核的 USB 子系统,启动数据传输。传输完成后,会触发 URB 中指定的回调函数。
函数参数:
struct urb *urb:指向 urb 的指针gfp_t mem_flags:内存分配标志,指定内存分配方式(如GFP_KERNEL、GFP_ATOMIC)GFP_ATOMIC:在中断处理函数,底半部,tasklet,定时器处理函数以及 urb 完成函数中,在调用者持有自旋锁或者读写锁时以及当驱动将current->state修改为非TASK_RUNNING时,应使用此标志。GFP_NOIO: 在存储设备的块 I/O 和错误处理路径中,应使用此标志。GFP_KERNEL: 如果没有任何理由使用GFP_ATOMIC和GFP_NOIO,就使用GFP_KERNEL。
成功时返回 0,提交失败,返回负的错误码。
第四步,提交由 USB 核心指定的 USB 主机控制器驱动
第五步,被 USB 主机控制器处理,进行一次到 USB 设备的传送。第四步和第五步由 USB核心和主机控制器完成,不受 USB 设备驱动的控制。
第六步,当 URB 处理完成,USB 主机控制器驱动通知 USB 设备驱动
USB 键盘上报的数据为 8 个字节,这 8 个字节的数据是 USB 按键按下又抬起的数据。
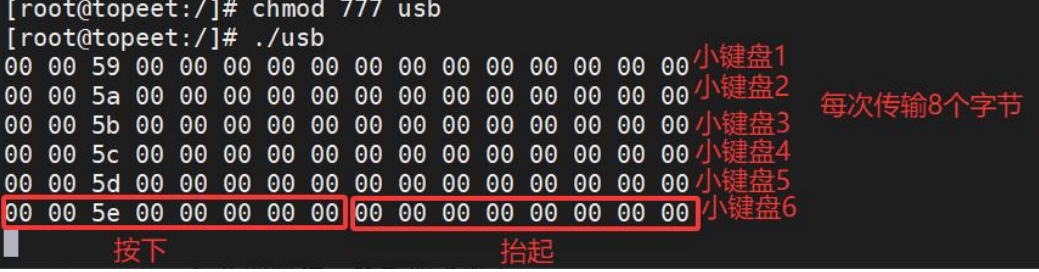
格式如下所示:
| Offset | Size | Description |
|---|---|---|
| 0 | Byte | 特定功能按键 |
| 1 | Byte | 保留位 |
| 2 | Byte | 按键 1 |
| 3 | Byte | 按键 2 |
| 4 | Byte | 按键 3 |
| 5 | Byte | 按键 4 |
| 6 | Byte | 按键 5 |
| 7 | Byte | 按键 6 |
其中 buff[0]是一个位域,每个位对应一个特殊按键的功能,当其中一位被设置为 1 时,表示按键被按下。位域结构如下表所示:
| Bit | Bit Length | Description |
|---|---|---|
| 0 | 1 | Left Ctrl |
| 1 | 1 | Left Shift |
| 2 | 1 | Left Alt |
| 3 | 1 | Left GUI(Windows/Super key) |
| 4 | 1 | Right Ctrl |
| 5 | 1 | Right Shift |
| 6 | 1 | Right Alt |
| 7 | 1 | Right GUI(Windows/Super key) |
示例
1 |
|
UDC 与 Gadget 驱动
USB gadget 指的是 USB 设备端的驱动框架,主要用于将具备 USB 功能的设备配置为从设备,与主机进行通信。
以智能手机为例,当手机通过 USB 线接入电脑时,手机即扮演了 USB Gadget 的角色。在接下来的实验中,我们要将开发板替代手机,扮演 USB Gadget 的角色。
根据下图的 USB 驱动开发框架图可知 Gadget 框架提供了一套标准化的 API 接口(Gadget Function API),这些接口在底层由 USB 设备控制器(UDC)驱动具体实现。
1 | ┌─────────────────────┐ ┌─────────────────────┐ |
值得注意的是,不同的 UDC(USB 设备控制器)可能需要适配不同的驱动程序,即便是基于相同 UDC 的不同硬件板卡,也可能需要对驱动程序进行修改。USB Gadget 模块的在内核
1 | DeviceDrivers---> |
将 iTOP-RK3568 开发板配置为 USB 网卡设备
- 将 RNDIS 驱动开启(如果选择编译成模块,单独编译内核不会生成 .ko文件,为了省去繁琐挂载步骤)
- 接下来选中一些网络协议配置
如图:
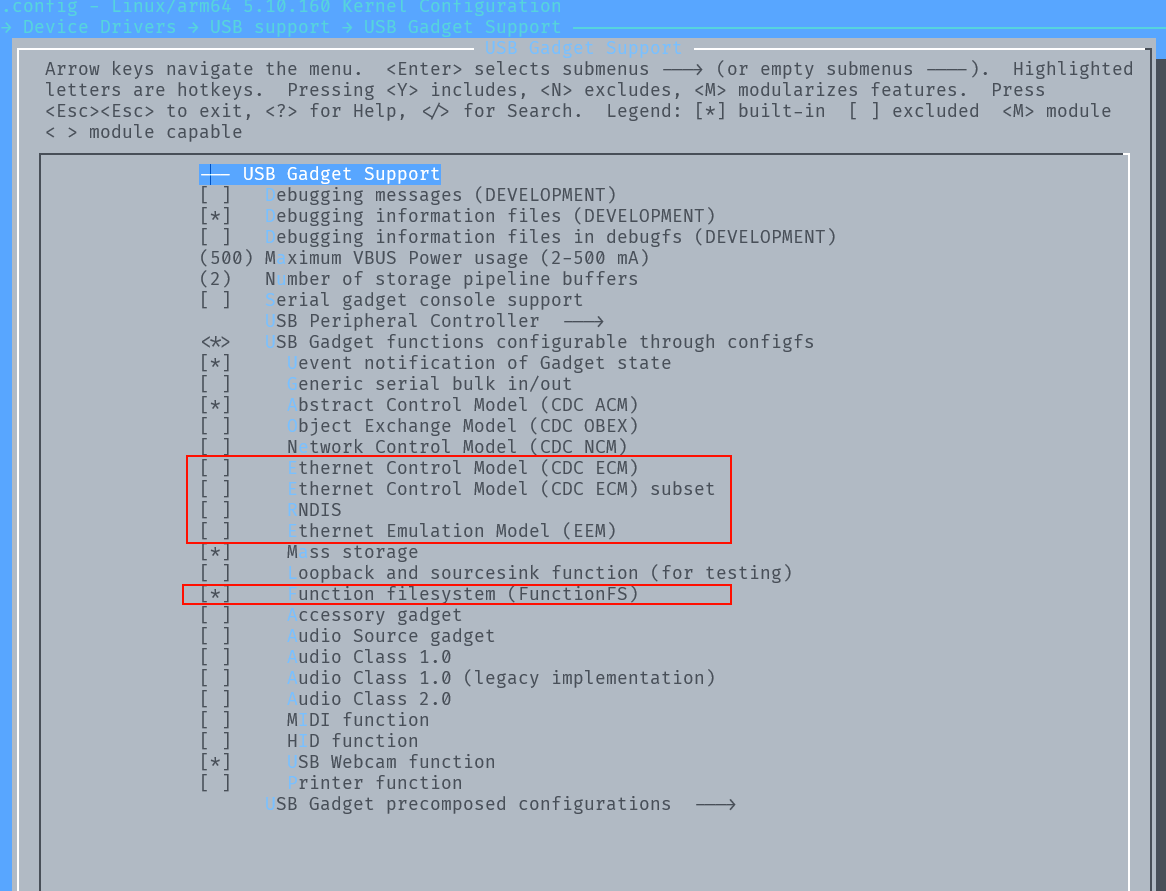
接下来找到 USB Gadget precomposed configurations,选中 with CDC Ethernet support,如下图所示
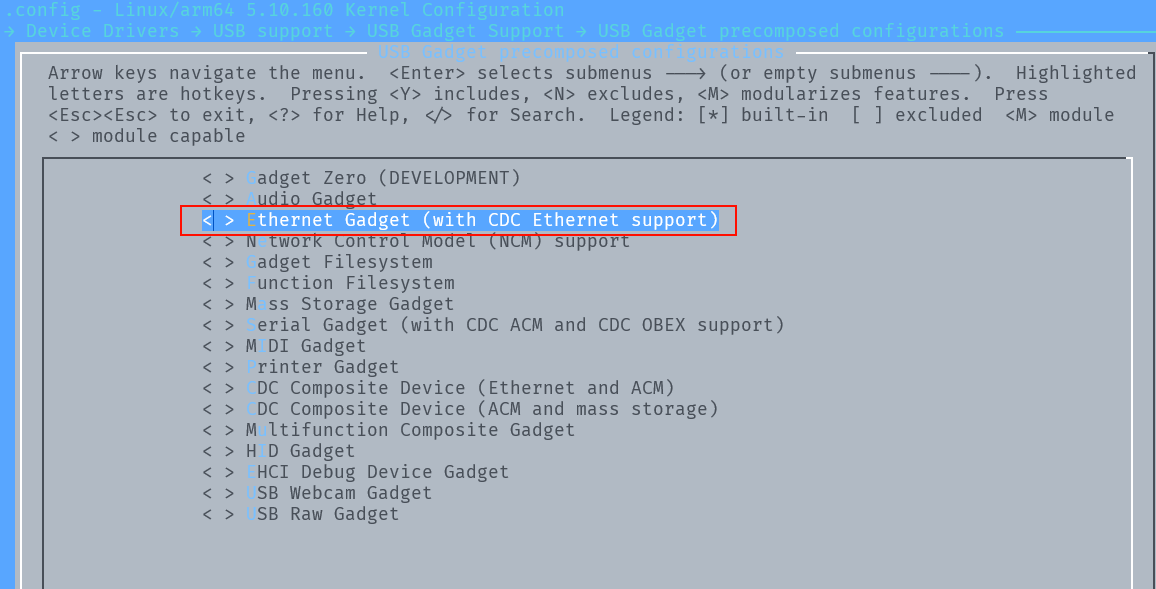
配置完成,重新编译内核源码,然后重新烧写内核镜像。在开发板完成重启流程后,执行ifconfig -a命令进行网络配置接口的列举,将能够观察到 usb0 网络接口。
host 和 phy 驱动
在 Linux 内核源码中,USB host 和 PHY 驱动是默认加载的,USB PHY 模块位于内核的以下路径。
1 | Device Drivers---> |
- USB 2.0 PHY 使用的是 Innosilicon IP,所以应选择“Rockchip INNO USB2PHY Driver”。
- USB 3.0 PHY 使用的是 Type-C,所以应选择“Rockchip TYPEC PHY Driver”。
- USB 3.0 PHY 使用的是 Innosilicon USB 3.0 PHY,所以应选择:“Rockchip INNO USB 3.0 PHY Driver”
USB Host 模块的配置位于内核以下路径
1 | Device Drivers---> |
必须选上 USB Support 项后才能支持 USB 模块并进行进一步的配置。如果需要支持 USB Host,首先需要选上<*>Supportfor Host-side USB 项,然后会现如下的 Host 相关的配置,其中:
- USB Host 1.1 选择 OHCI Driver 配置
- USB Host 2.0 选择 EHCI Driver 配置
- USB Host 3.0 选择 xHCI Driver 配置。
上述模块确认选中之后,接下来配置设备树。
1 | // rk3568.dtsi |
配置 USB3.0 OTG 功能,设备树配置如下:
1 | // topeet-rk3568-linux.dtsi |
HOST1 配置为 USB 3.0 Host 功能,设备树配置如下:
1 | // topeet-rk3568-linux.dtsi |
HOST1 配置成 USB 2.0 Host,设备树配置如下:
1 | &usbhost30 { |
更多详细资料可以查阅瑞芯微官方资料 rk356x_linux/doc/Common/USB/Rockchip_Developer_Guide_USB_CN.pdf。
4G 模块移植
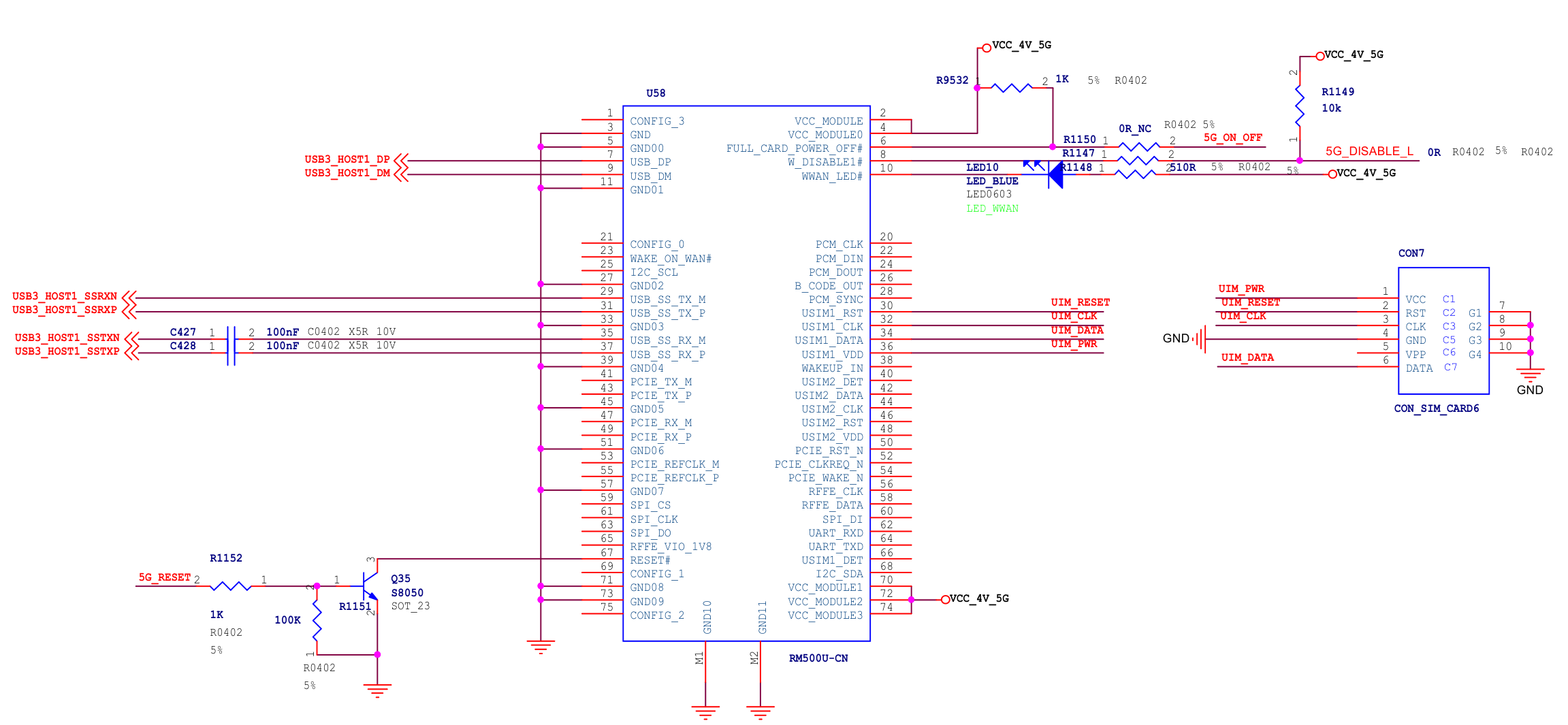
上图中的 U58 接口兼容了 4G 模块和 5G 模块。在这里是使用 USB 接口与 CPU 进行连接的,目的是 CPU 通过 USB 接口将 EM05-CE(4G) 模块挂载到系统上,将 EM05-CE 模拟成一个网络设备和 4 个 USB 串口设备
- 串口设备的作用是对模块进行一些初始化操作、错误检测、读取定位信息等
- 网络设备的作用是将 EM05-CE 作为一个通用的网卡设备,供上层 socket 调用。
4G 模块或者 5G 模块的移植可以参考移远技术文档。
内核驱动移植
首先修改驱动支持 EM05-CE 模块的 PID 和 VID,打开 drivers/usb/serial/option.c 文件,struct usb_device_id option_ids[] 数组中添加如下代码:
1 | static const struct usb_device_id option_ids[] = { |
修改 drivers/usb/serial/usb_wwan.c 文件,添加零包机制
1 | static struct urb *usb_wwan_setup_urb(struct usb_serial_port *port, |
然后添加重启休眠机制,打开 drivers/usb/serial/option.c 文件,添加如下语句:
1 | static struct usb_serial_driver option_1port_device = { |
对于通过 USB 接口访问的模块,在 Linux 内核中集成 USB 驱动程序。我们需要配置内核选中支持 GSM 和 CDMA 模块的 USB 转串口驱动,选中下面路径的驱动,这个驱动的作用就是在内核中虚拟出/dev/ttyUSB0、/dev/ttyUSB1、/dev/ttyUSB2、/dev/ttyUSB3 这几个串口,他们的作用分别是错误诊断、gps 信息接口、模块的的通信接口。如下所示。
1 | --> Device Drivers |
拨号脚本移植
首先配置内核支持 ppp 拨号,我们在 menuconfig 中按如下所示选中下列的选项。
1 | --> Device Drivers |
硬件连接好之后,将开发板上电启动。切换成 ECM 拨号,输入命令cat /dev/ttyUSB2 & echo -e “AT+QCFG=\”usbnet\”,1\r\n” > /dev/ttyUSB2,然后重启开发板。
开发板重启之后会进行自动拨号,接着在调试串口终端输入“ifconfig”命令,可以看到有 usb0 节点,然后输入ping www.baidu.com命令查看是否可以 ping 通网络。
除了上述所讲的 ECM 拨号,我们也可以使用 quectel-CM 工具进行拨号
编译完成之后,生成 quectel-CM 可执行程序。我们将此程序拷贝到开发板上进行下面的测试。在之前操作中使用了 ECM 拨号,在使用 quectel-CM 拨号之前,我们需要输入cat /dev/ttyUSB2 & echo -e “AT+QCFG=\”usbnet\”,0\r\n” > /dev/ttyUSB2命令切换成 RmNET 拨号。然后运行 quectel-CM 可执行程序,如下图所示:
拨号脚本执行之后,在串口终端输入ifconfig命令可以看到多了 wwan0 节点。