Linux ADC
时间轴
2026-01-14
init
ADC 基础
模拟信号与数字信号
模拟信号是一种连续变化的信号,其值可以在一定范围内取任意值。它在时间上和幅度上都是连续的,能够精确地反映自然界中的物理量变化。例如,温度传感器输出的电压信号、麦克风拾取的声音信号以及光敏电阻检测到的光强信号等,都属于模拟信号的范畴。
数字信号是一种离散的信号,其值只能在有限的范围内取特定的数值,通常以二进制形式表示。它的特点是时间上是离散的(采样点之间有固定的时间间隔),幅度上也是离散的(经过量化后的值)。例如,计算机中存储和处理的数据、MP3 文件中的音频数据以及 JPEG 图像文件中的像素值等,都是数字信号的具体体现。
| 维度 | 模拟信号特点 | 数字信号特点 |
|---|---|---|
| 本质 | 连续变化、取值任意 | 离散取值、常以二进制表示 |
| 特性 | 时间 + 幅度均连续 | 时间(采样间隔)+ 幅度(量化值)均离散 |
| 优势 | 精准反映自然物理量变化 | 易存储 / 传输 / 处理、抗干扰能力强 |
| 典型场景 | 传感器原始信号、自然声光电信号 | 计算机数据、数字音视频文件 |
ADC 概念
ADC 是 Analog-to-Digital Converter 的缩写,可以翻译为模数转换器。它是一种电子设备或电路模块,用于将连续变化的模拟信号(如电压、电流等)转换为离散的数字信号。这些数字信号可以被计算机、微控制器或其他数字系统处理和存储。
ADC 将模拟信号转换为数字信号通常分为采样、保持、量化以及编码四个步骤,每个步骤的定义以及作用如下表所示:
| 步骤 | 定义 | 作用 | 关键参数或特点 |
|---|---|---|---|
| 采样(Sampling) | 以固定的时间间隔对模拟信号进行测量的过程。 | 将时间上连续的模拟信号离散化,为后续数字化处理奠定基础。 | 采样频率(Sampling Rate),即每秒采样的次数。根据奈奎斯特采样定理,采样频率至少是信号最高频率的两倍。 |
| 保持(Holding) | 在采样完成后,将信号的瞬时值保持一段时间以便后续处理。 | 确保信号在量化过程中不会因快速变化而失真,提高转换的精度和稳定性。 | 无明确参数,主要目的是稳定信号。 |
| 量化(Quantization) | 将采样得到的连续幅值映射到一组离散数值上的过程。 | 将幅度上连续的信号离散化,使其能够被数字系统表示。 | 分辨率(Resolution),通常用位数表示(如 8 位、10 位、12 位等)。分辨率越高,信号越精确。 |
| 编码(Encoding) | 将量化后的数值转换为二进制代码的过程。 | 将离散的数值以数字系统可识别的形式表示出来,便于存储、传输和处理,使模拟信号能被计算机或其他数字设备使用。 | 无明确参数,重点是生成适合数字系统使用的二进制代码。 |
ADC 广泛应用于传感器信号采集、音频处理、图像处理、工业自动化以及医疗设备中:
- 传感器信号采集:许多传感器输出的是模拟信号。例如,温度传感器、压力传感器、光敏传感器等采集到的环境数据通常以模拟信号形式存在。
- 音频处理:麦克风拾取的声音信号是模拟信号。
- 图像处理:摄像头捕捉的光信号本质上是模拟信号。
- 工业自动化:各种物理量(如速度、位置、压力等)的测量通常依赖于传感器输出的模拟信号。
- 医疗设备:许多生物信号(如心电图、脑电图等)是以模拟信号形式采集的。
ADC分辨率
ADC 的分辨率是指模数转换器能够区分的最小信号变化的能力。换句话说,它是 ADC 将模拟信号量化为离散数字值时的精细程度。在 ADC 中,分辨率越高,意味着它可以更精确地表示输入的模拟信号。当我们将数字信号通过 DAC(数模转换器)还原为模拟信号时,高分辨率的 ADC 能够生成更接近原始模拟信号的结果。
ADC 的分辨率通常用位数来表示,例如 8 位、10 位、12 位等。位数决定了 ADC 能够输出的离散数值的数量,n 位 ADC 可以表示 2^n 个不同的数值。例如,8 位 ADC 可以表示 2^8=256 个不同的数值;10 位 ADC 可以表示 2^10= 1024 个不同的数值;12 位 ADC 可以表示 2^12= 4096 个不同的数值。位数越高,分辨率越高,能够区分的信号变化越小。
分辨率可以通过以下公式计算:
$$
\text{分辨率} = \dfrac{\text{量程}}{2^n}
$$
其中:
- 量程是指 ADC 输入信号的最大范围(即参考电压范围);
- n 是 ADC 的位数;
- 2^n 表示 ADC 能够区分的离散数值总数。
例子:假设一个 3 位 ADC 的参考电压(量程)为 2V,计算他的分辨率:
- 量程 = 2V
- 位数为 3,2^n = 2^3 = 8;
代入分辨率计算公式可得 2V/8= 0.25V。这意味着该 ADC 能够将输入信号分成 8 个离散的等级,每个等级之间的步长为 0.25V。
除了分辨率,ADC的其他参数如下
| 参数 | 定义 | 作用或意义 |
|---|---|---|
| 采样时间(Sampling Time) | 完成一次采样所需的时间。 | 决定了 ADC 能够以多快的速度捕获输入信号的变化。如果采样时间过长,可能会导致信号失真或丢失细节。 |
| 转换时间(Conversion Time) | 将模拟信号转换为数字信号所需的时间。 | 直接影响 ADC 的速度和效率。较短的转换时间意味着 ADC 可以更快地处理信号。 |
| 采样频率(Sampling Frequency) | 每秒采集样本的次数,常用单位为 ksps(千次 / 秒)或 Msps(百万次 / 秒)。 | 决定了 ADC 对信号变化的捕捉能力。根据奈奎斯特采样定理,采样频率必须至少是信号最高频率的两倍,才能准确还原信号。 |
| 精度(Accuracy) | ADC 输出的数字值与实际模拟输入值之间的误差。 | 反映了 ADC 的可靠性和测量质量,是衡量其性能的重要指标。 |
RK3568 ADC
在 RK3568 数据手册中的外设资源框图中可以找到,RK3568 这颗 SOC 总共有 8 路 SARADC。
SARADC (Successive Approximation Register Analog-to-Digital Converter)的中文名称为逐次逼近型 ADC;
除了 SAR ADC 之外,还有两路 TS-ADC(Temperature Sensor ADC),他们分别用来检测 CPU 和 GPU 的温度,如果在一段时间内检测到温度过高,则会向处理器发出中断信号以采取降温措施;如果温度持续过高,将复位整个芯片,达到重启的效果。TS-ADC 只负责检测 CPU 和 GPU 的温度所以并未在底板引出。
ADC 按键
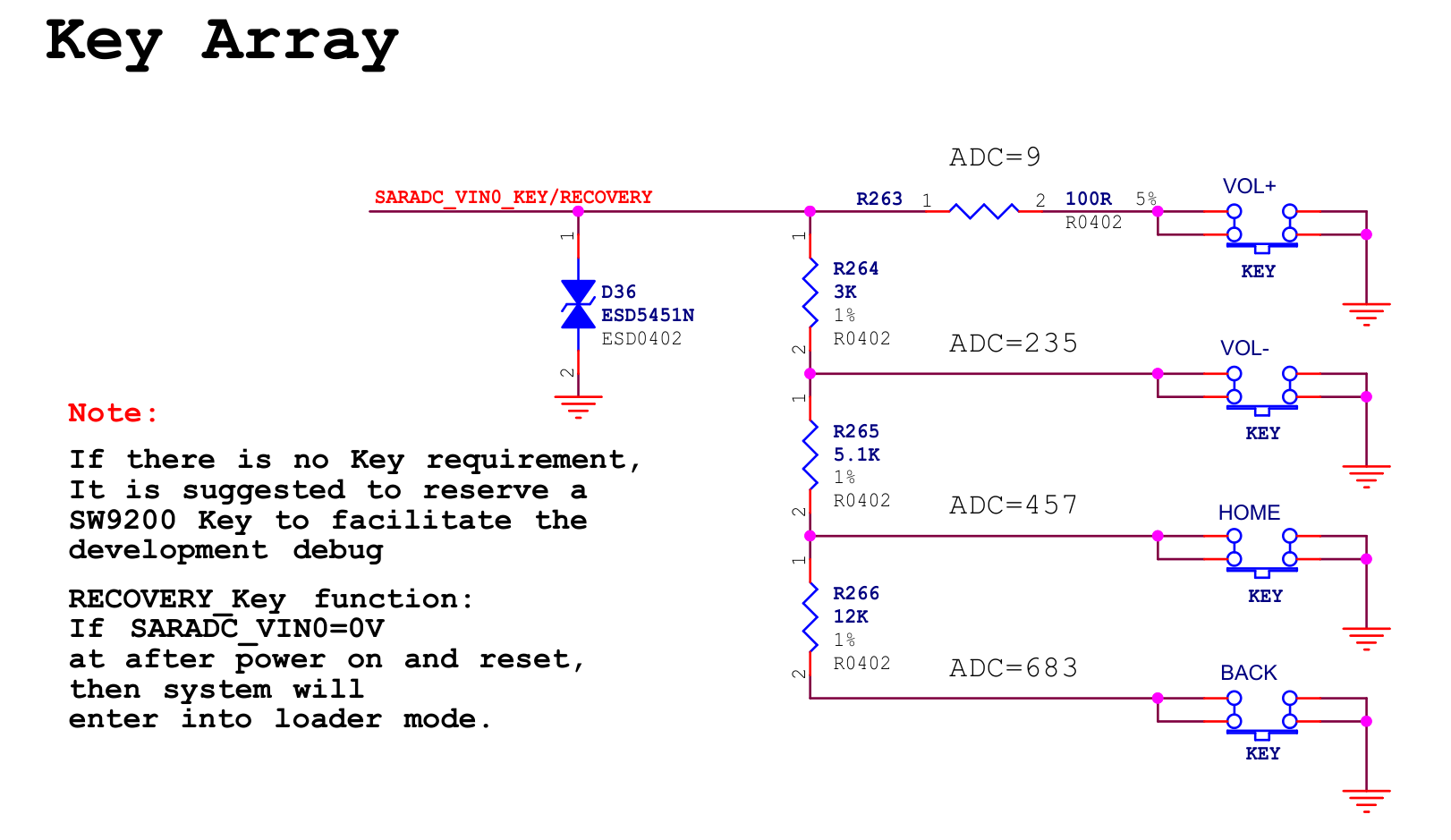
ADC 按键 是 SARADC 外设,ADC 按键的工作原理是将多个按键连接到同一个 ADC 引脚上,并通过不同的分压电阻产生不同的电压,通过 ADC 测量该电压,并与预设的电压范围进行比对,从而判断哪个按键被按下。
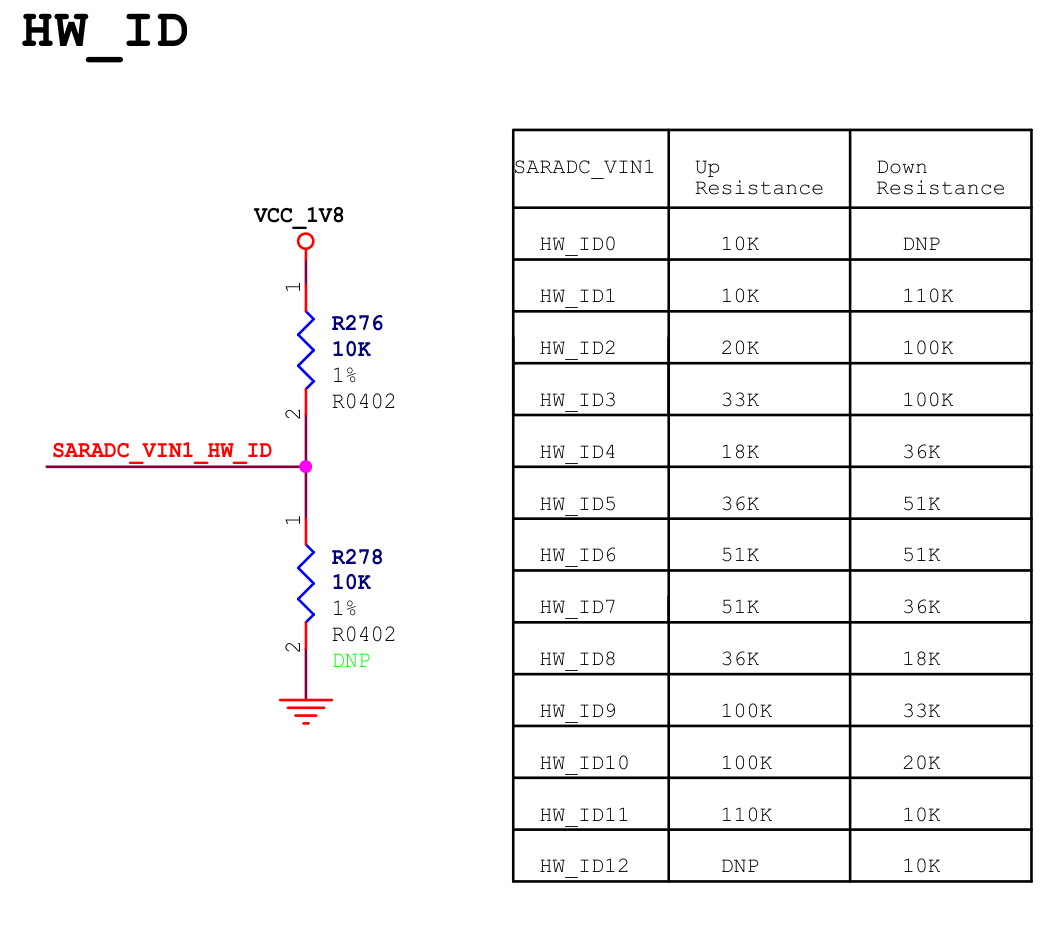
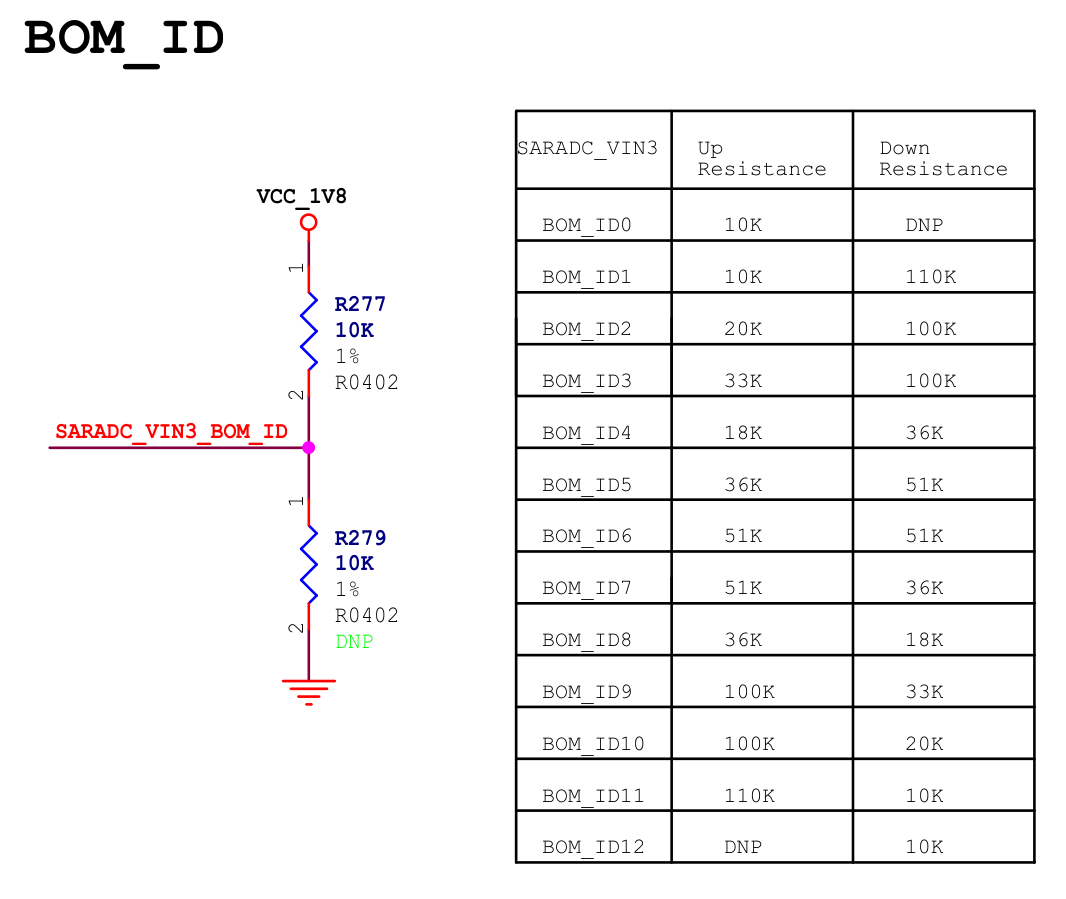
有两路 ADC 分别被用在了 HW_ID 和 BOM_ID 上,用于不同电子设备的硬件识别,但由于topeet的外设都是通用的,所以这两路 ADC 并没有被用到。
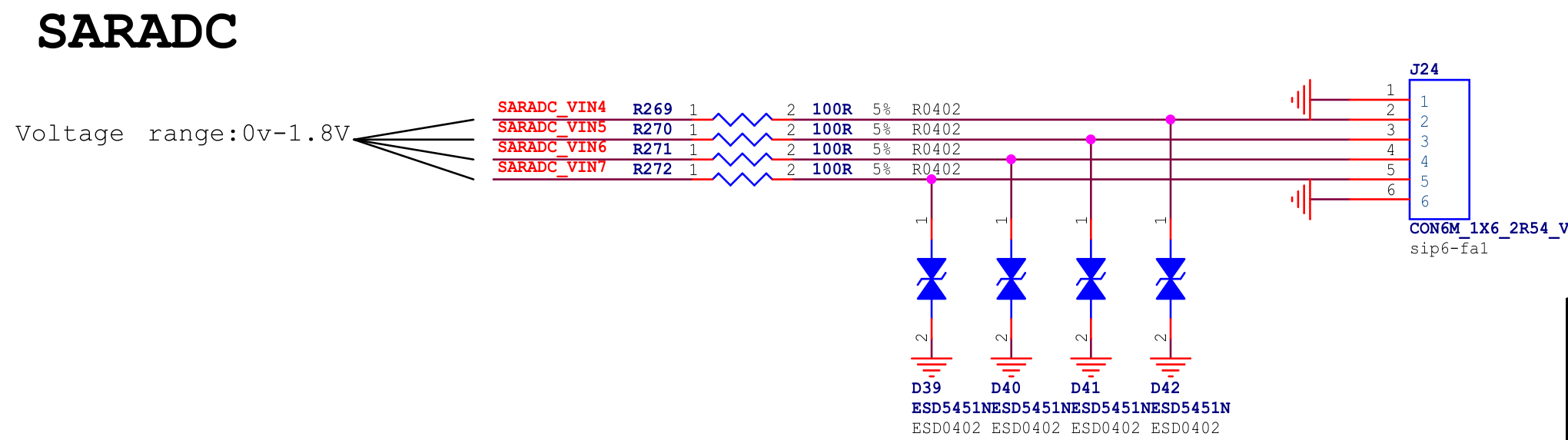
有 4 路 ADC 被连接到了 6pin 的座子上,原理图如下所示
总结如下
| ADC 接口 | 复用功能 |
|---|---|
| SARADC VIN0 | 用作按键引脚(音量 +,音量 -,HOME,BACK) |
| SARADC VIN1 | 用作 HW ID 引脚 |
| SARADC VIN2 | 未使用 |
| SARADC VIN3 | 用作 BOM ID 引脚 |
| SARADC VIN4 | 未使用 |
| SARADC VIN5 | 未使用 |
| SARADC VIN6 | 未使用 |
| SARADC VIN7 | 未使用 |
逐次逼近型 ADC
逐次逼近型 ADC(Successive Approximation Register ADC,简称 SAR ADC)是一种常见的模数转换器,其工作原理基于逐次逼近算法。它通过逐步比较输入模拟信号与内部生成的参考电压,最终确定一个接近输入信号的数字值。SAR ADC 工作原理示意图如下所示
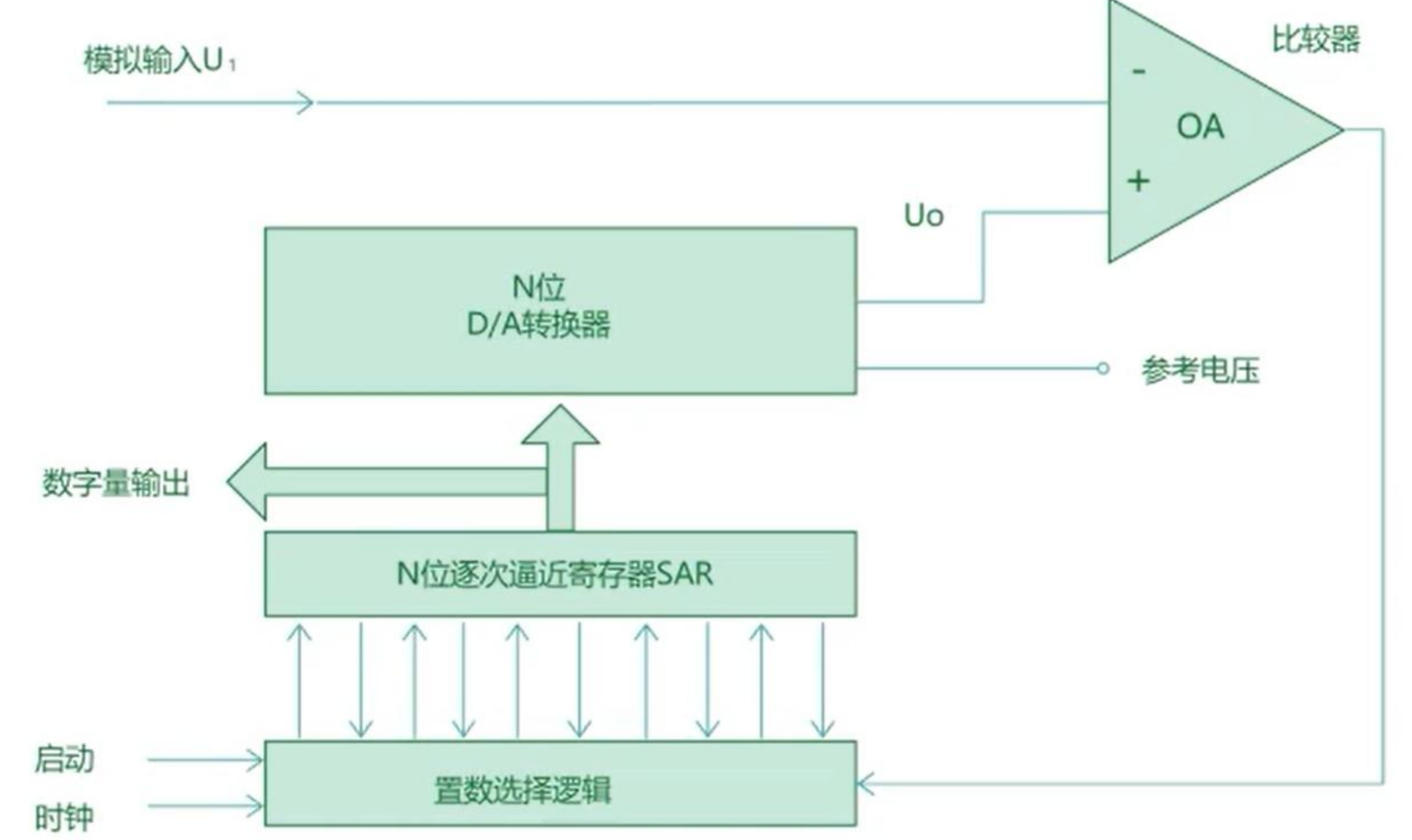
由上图可知逼近寄存器型模数转换器(SAR ADC)主要由以下几个部分组成:
- 比较器(Comparator):用于比较输入模拟信号 U1 和 D/A 转换器(DAC)输出的参考电压 U0,并产生反馈信号。
- N 位 D/A 转换器(DAC):将数字值转换为模拟电压,与输入信号进行比较,以逐步逼近目标值。
- N 位逐次逼近寄存器(SAR):用于存储当前的比较结果,并根据比较器的反馈调整数值,最终确定数字输出。
- 置数选择逻辑:控制逐次逼近寄存器的位选择过程,按二分法调整 DAC 的输出电压。
工作过程:
- 首先,模拟输入信号 U1 进入 ADC,并由采样电路暂存,以便进行后续处理。
- 随后,逐次逼近寄存器(SAR)初始化,并通过置数选择逻辑电路的控制,按照二分法逐步确定最终的数字输出值。
在转换过程中,SAR 从最高位开始假设为 1,并将当前的 N 位数字值传递给 D/A 转换器。DAC 将其转换为模拟电压 U0,然后送入比较器,与输入信号 U1 进行比较。如果 U0 小于 U1,当前位保持 1;否则,当前位改为 0。这个过程不断重复,每次确定一位,直到所有 N 位都完成,形成最终的数字输出。
- 最终,SAR 将确定的 N 位数字值输出,完成一次模数转换。
举例如下:
5 位逐次逼近型 ADC 在参考电压为 32mV、待测电压为 21.5mV 的情况
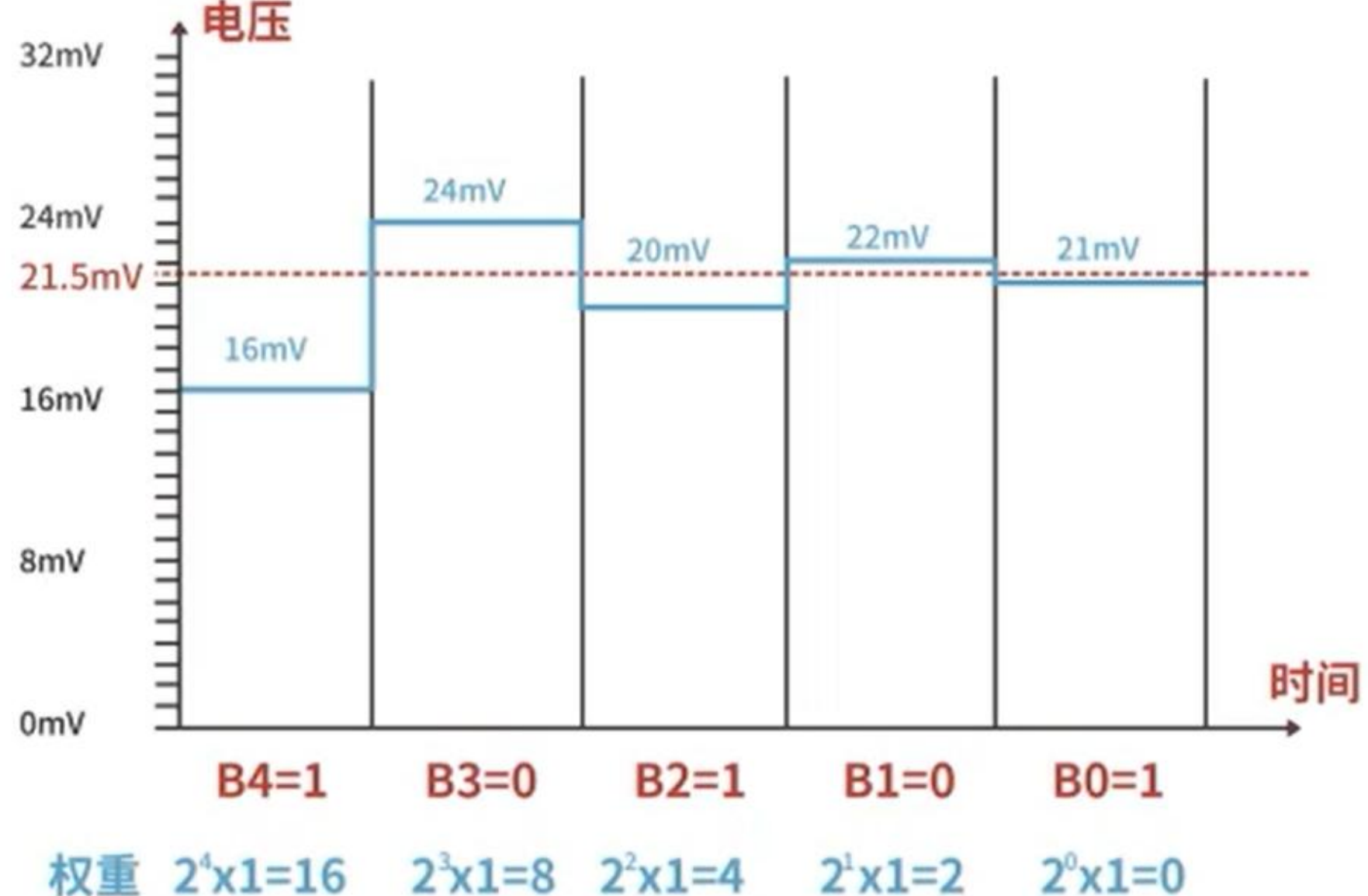
- 设置最高位:SAR 寄存器将最高位(第 5 位)设置为“1”,其余位为“0”,当前 SAR 值为 10000(二进制),即 16(十进制)。DAC 根据 SAR 值生成参考电压 U0=16×1mV=16 mV。比较器比较 U1=21.5 mV,V_0 =16,由于 U1>U0,因此保留当前位为“1”。
- 设置次高位:SAR 寄存器保持最高位为“1”,并将次高位(第 4 位)设置为“1”,此时 SAR 值为 11000(二进制),即 24(十进制)。DAC 生成参考电压 U0=24×1 mV=24 mV。比较器比较 U1=21.5 m 和 U0=24 mV,由于 U1<U0,因此将当前位重置为“0”。
- 设置第三位:SAR 寄存器保持前两位为“10”,并将第三位(第 3 位)设置为“1”,此时 SAR 值为 10100(二进制),即 20(十进制)。DAC 生成参考电压 U0=20×1 mV=20 mV。比较器比较 U1=21.5 mV 和 U0=20 mV,由于 U1>U0,因此保留当前位为“1”。
- 设置第四位:SAR 寄存器保持前三位为“101”,并将第四位(第 2 位)设置为“1”,此时 SAR 值为 10110(二进制),即 22(十进制)。DAC 生成参考电压 U0=22×1 mV=22 mV。比较器比较 U1=21.5 mV 和 U0=22 mV,由于 U1<U0,因此将当前位重置为“0”。
- 设置最低位:SAR 寄存器保持前四位为“1010”,并将最低位(第 1 位)设置为“1”,此时 SAR 值为 10101(二进制),即 21(十进制)。DAC 生成参考电压 U0=21×1 mV=21 mV。比较器比较 U1=21.5 mV 和 U0=21 mV,由于 U1>U0,因此保留当前位为“1”。
- 结果:经过逐次逼近后,SAR 寄存器的值为 10101(二进制),即 21(十进制)。
操作 ADC
进入到/sys/bus/iio/devices/iio:device0 目录下

需要注意的是 in_voltageX_raw 和 in_voltage_scale。
in_voltageX_raw表示 ADC 某个通道的原始采样值,其中 X 是通道编号(如 0, 1, 2, …, 7)。它以整数形式存储 ADC 转换后的数字代码,用户可以通过读取该文件获取对应通道的未经缩放的原始数据。需要注意的是,这些值并未经过量程缩放,必须结合in_voltage_scale进行计算才能得到实际电压值。in_voltage_scale是用于将 ADC 原始采样值转换为实际电压值的缩放因子,通常定义为 1.8/1024。它以浮点数形式表示,单位可以是毫伏(mV)或伏特(V),具体取决于硬件实现。通过将in_voltageX_raw的原始值乘以in_voltage_scale,即可得到对应通道的实际电压值,从而实现从数字代码到物理量的转换
这里以 ADC 的通道 7 为例进行演示,对应的硬件为底板的 J24 的第 5 脚,具体如下图所示
DC 的通道 7 对应的原始采样值为 in_voltage7_raw,使用 cat 命令进行读取,读取到的值如下所示:
1 | $ cat involtage7_raw |
这里读取到的是未经缩放的原始数据,然后继续使用cat命令读取缩放因子 in_voltage_scale 的值,具体如下所示:
1 | $ cat in_voltage_scale |
然后将获取到的原始采样值与缩放因子相乘即可得到实际电压值 1017x1.757812500=1787.6953125 mv=1.787 V
而除了上面的 SAR ADC 之外,还有着两路 TSADC,他们分别用来查询 CPU 和 GPU 的温度,
查看 CPU 的温度:
1 | cat /sys/class/thermal/thermal_zone0/temp |
查看 GPU 的温度:
1 | cat /sys/class/thermal/thermal_zone1/temp |
ADC 驱动程序
编写一个 ADC 驱动程序,通过杂项设备创建一个 ADC 设备节点,通过该节点来读取对应通道的 ADC 值。
API 函数
iio_channel_get()
函数原型
1 | struct iio_channel *iio_channel_get(const char *name, const char *channel_name); |
核心作用
从 Linux IIO 子系统中,根据「IIO 设备名」和「通道名」,获取一个对应的 struct iio_channel 通道结构体指针,后续所有对该 ADC 通道的操作都依赖这个指针。
参数说明
name:指定要操作的 IIO 设备名称 / ID,如果传NULL表示使用系统默认的 IIO 设备;SARADC 场景常用NULLchannel_name:指定要打开的 ADC 通道名称,具体名称要和内核驱动匹配。
返回值
- ✅ 成功:返回有效的
struct iio_channel *结构体指针(通道句柄); - ❌ 失败:返回内核错误指针
ERR_PTR(错误码),不能直接作为正常指针使用。
iio_channel_release()
获取的通道句柄用完必须释放,否则造成内核资源泄漏,释放函数固定搭配:
1 | void iio_channel_release(struct iio_channel *channel); |
- 参数:就是
iio_channel_get获取到的通道指针 - 特性:无返回值,安全调用即可。
struct iio_channel
1 | struct iio_channel { |
iio_read_channel_raw()
函数原型
1 | int iio_read_channel_raw(struct iio_channel *channel, int *val); |
核心作用
从已经打开的 IIO 通道(ADC 通道)中,读取未经任何校准 / 换算的原始整型数据,是 ADC 数据读取的核心函数。
✔️ 你的 SARADC 场景:读取到的
val就是 ADC 引脚采集到的电压对应的原始数字量(比如 10 位 ADC 就是 0~1023 的数值)。
参数说明
channel:输入参数,iio_channel_get成功返回的通道句柄,必须是有效指针;val:输出参数,一个整型指针,函数执行成功后,采集到的 ADC 原始数据会被写入该地址指向的变量中。
返回值
- ✅ 成功:返回
0; - ❌ 失败:返回负数的内核错误码(如 -EINVAL 无效参数、-ENODEV 设备不存在等)。
关键注意点
读取到的 val 是 原始裸数据:
- 无单位、无校准、无换算,只是 ADC 模数转换后的纯数字值;
- 数值范围由 ADC 位数决定(比如 8 位 ADC:0
255;10 位 ADC:01023;12 位 ADC:0~4095); - 如果需要换算成实际的电压值,需要自己写公式:
实际电压 = (原始值 / ADC最大量程) * ADC参考电压。
内核驱动中标准写法
1 | // 步骤1:定义变量 |
设备树
添加设备节点:
1 | adc7: adc-test { |
重点在 io-channels,意味要使用的是 ADC 的第 7 个通道
驱动程序
1 |
|
测试:
1 | #include <stdio.h> |